Arduino - motor
Vamos a aprender:
- ¿Qué tipos de motores se pueden usar con Arduino?
- ¿Cuáles son las diferencias entre los tipos de motores?
- ¿Cómo controlar cada tipo de motor?
Tipos de Motores
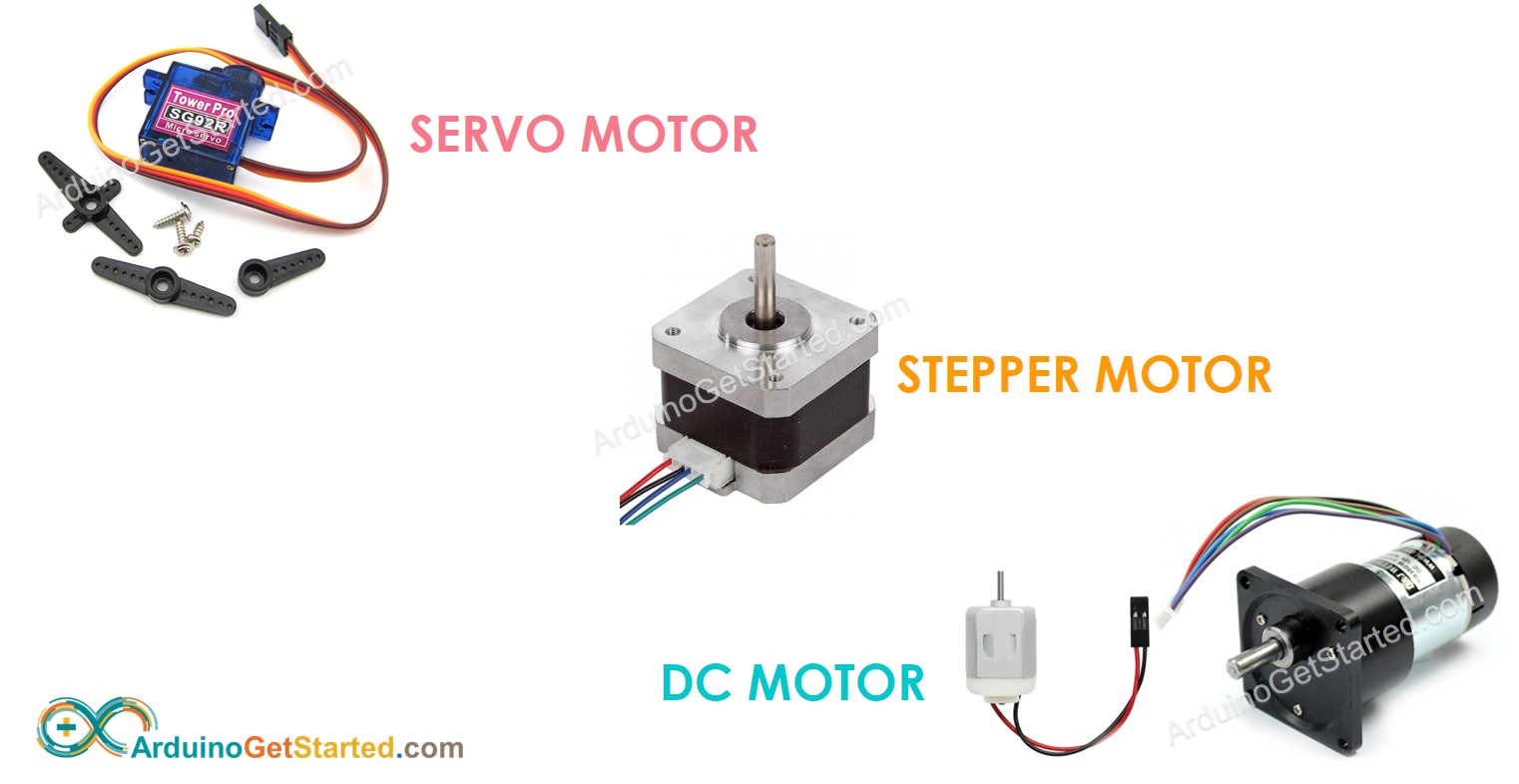
Hay tres tipos de motores que se utilizan ampliamente con Arduino:
- Servomotor
- Motor paso a paso
- Motor de corriente continua
El servomotor incluye dos tipos principales: servomotor de 180° y servomotor de 360°. De hecho, la mayoría de las personas entiende implícitamente "servomotor" como "servomotor de 180°".
El motor servo de 360° es similar al motor de corriente continua, excepto que no se requiere un controlador de hardware.
Servomotor de 180°
Características
- La rotación está limitada entre 0° y 180°
- Dirección de rotación: en sentido horario, en sentido antihorario
- La posición de rotación se puede controlar para girar a un ángulo específico entre 0° y 180°
- La velocidad de rotación se puede controlar, pero no de forma suave
- Controlador de hardware adicional: NO se requiere. Simplemente controlarlo directamente desde un pin de Arduino
- Fuente de alimentación adicional: requerida
- Cómo controlar: fácil, solo use una señal PWM
Aplicación
- Cualquier aplicación que solo requiera girar un ángulo entre 0° y 180°
Tutorial de servomotor
Motor paso a paso
Características
- La rotación es ilimitada
- Dirección de giro: horario, antihorario
- La posición de giro: se puede controlar para girar con precisión a cualquier posición angular
- La velocidad de rotación: se puede controlar con precisión. Además, la aceleración y la desaceleración pueden controlarse con precisión
- Controlador de hardware adicional: requerido
- Fuente de alimentación adicional: requerida
- Cómo controlar: complicado; los principiantes deben usar la biblioteca
Aplicación
- Automatización y robótica
- Impresoras, impresora 3D, CNC, trazador XY,
- Máquina de cócteles
Tutorial de motor paso a paso
- Arduino - Stepper Motor tutorial
- Arduino - 28BYJ-48 Stepper Motor tutorial
Motor de corriente continua
Características
- La rotación es ilimitada.
- Dirección de rotación: en sentido horario, en sentido antihorario.
- Posición de rotación: muy difícil girar con precisión a un ángulo específico.
- Velocidad de rotación: es fácil controlar qué tan rápido, pero muy difícil controlar con precisión un valor de velocidad específico.
- Controlador de hardware adicional: requerido.
- Fuente de alimentación adicional: requerida.
- Cómo controlar: fácil, solo usa una señal PWM de alto voltaje.
※ Nota:
- Para controlar la posición de un motor de corriente continua, necesitamos hardware adicional, llamado codificador, y luego usar un método de control en lazo cerrado, como el método de control PID. Esto es muy difícil para los principiantes.
- Para el control de la velocidad, podemos controlar fácilmente qué tan rápido es, por ejemplo, lento, medio, rápido, muy rápido, qué porcentaje de la velocidad máxima. Sin embargo, para controlar cuántos giros por segundo, necesitamos hardware adicional, llamado codificador, y luego usar un método de control en lazo cerrado, como el método de control PID. Esto es muy difícil para los principiantes.
- Algunos motores de corriente continua en el mercado tienen un codificador integrado.
Aplicación
- Se utiliza para controlar algo que necesita girar de forma continua, pero no es necesario especificar el valor de la velocidad. Por ejemplo: ventilador, bomba, coche de radiocontrol, taladro ...
※ Nota:
Hay dos tipos principales de motores de corriente continua: los motores de CC con escobillas y los motores de CC sin escobillas. El motor de CC con escobillas se utiliza ampliamente en proyectos de bricolaje.
Tutorial de motor de corriente continua
Guía de selección de motor
Elegir un motor para un proyecto depende de muchos factores, como el peso transportado, la fuente de alimentación y las características de la aplicación...
- Si tu proyecto necesita girar a una posición angular entre 0° y 180°, encuentra un servomotor de 180° adecuado
- Si tu proyecto necesita girar con precisión a cualquier posición, encuentra un motor paso a paso adecuado
- Si tu proyecto necesita girar de forma continua con precisión sin ninguna posición, encuentra un motor DC o servomotor de 360° adecuado