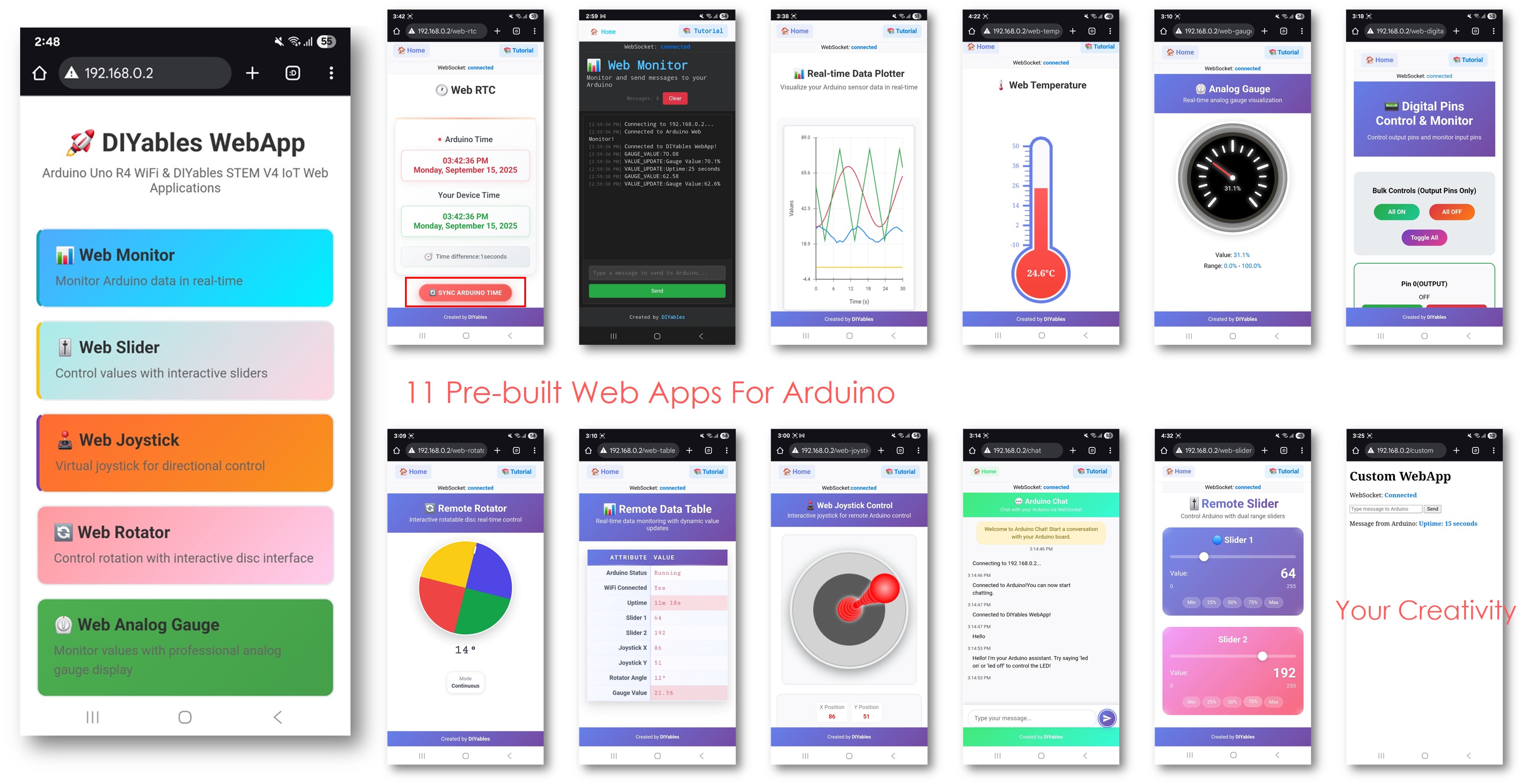
Este ejemplo muestra cómo usar varias aplicaciones web simultáneamente con la biblioteca ESP32 WebApps de DIYables. Demuestra la integración de varias interfaces web interactivas, como monitoreo, control y comunicación, dentro de un solo proyecto. Diseñado para la plataforma ESP32, este ejemplo es ideal para aprender cómo combinar y gestionar varias características basadas en la web al mismo tiempo, proporcionando una base sólida para proyectos avanzados de IoT.
Siga estas instrucciones paso a paso:
Conecta la placa ESP32 a tu computadora usando un cable USB.
Inicia el IDE de Arduino en tu computadora.
Selecciona la placa ESP32 adecuada (p. ej. ESP32 Dev Module) y el puerto COM.
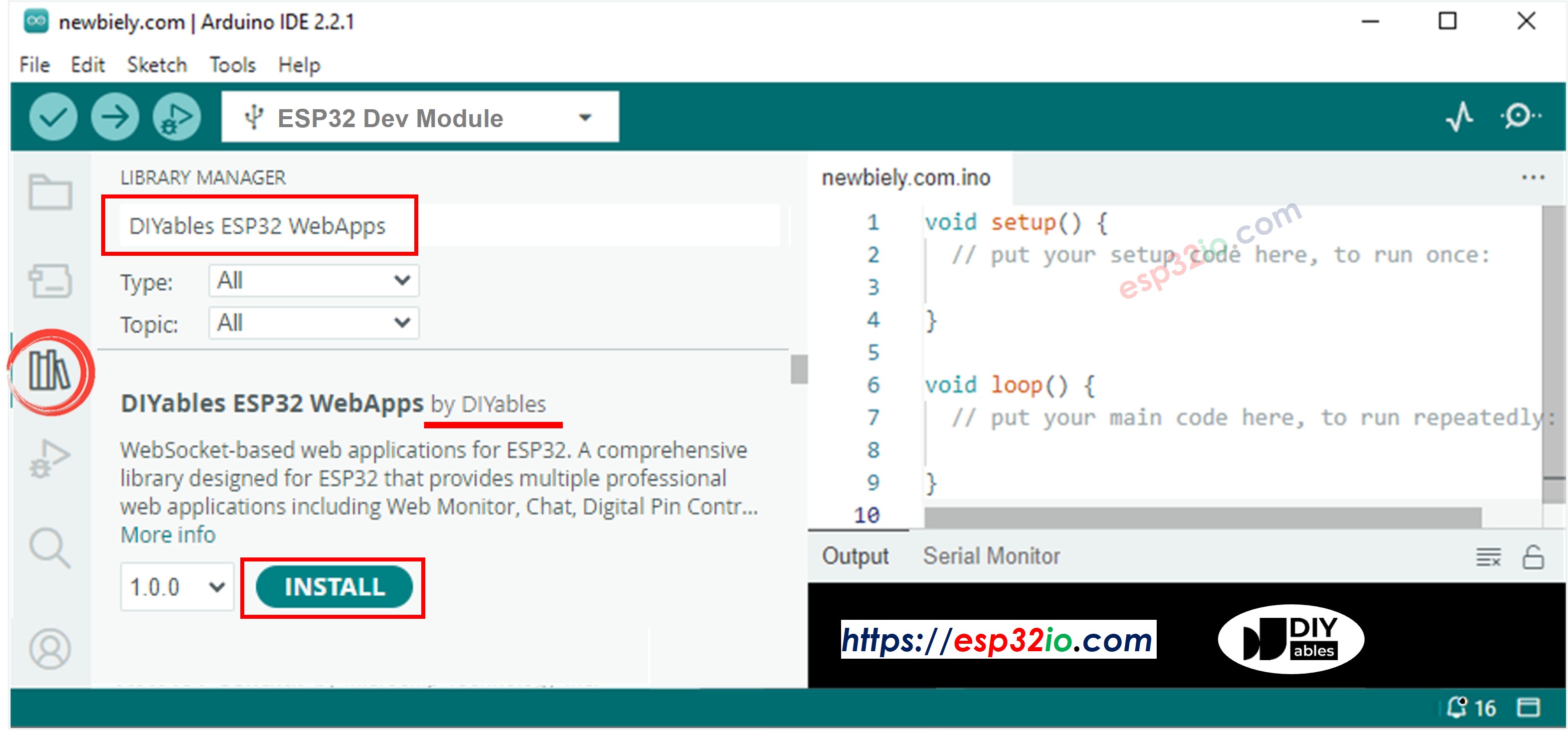
Ve al icono de Bibliotecas en la barra izquierda del IDE de Arduino.
Busca "DIYables ESP32 WebApps", luego encuentra la DIYables ESP32 WebApps Library de DIYables
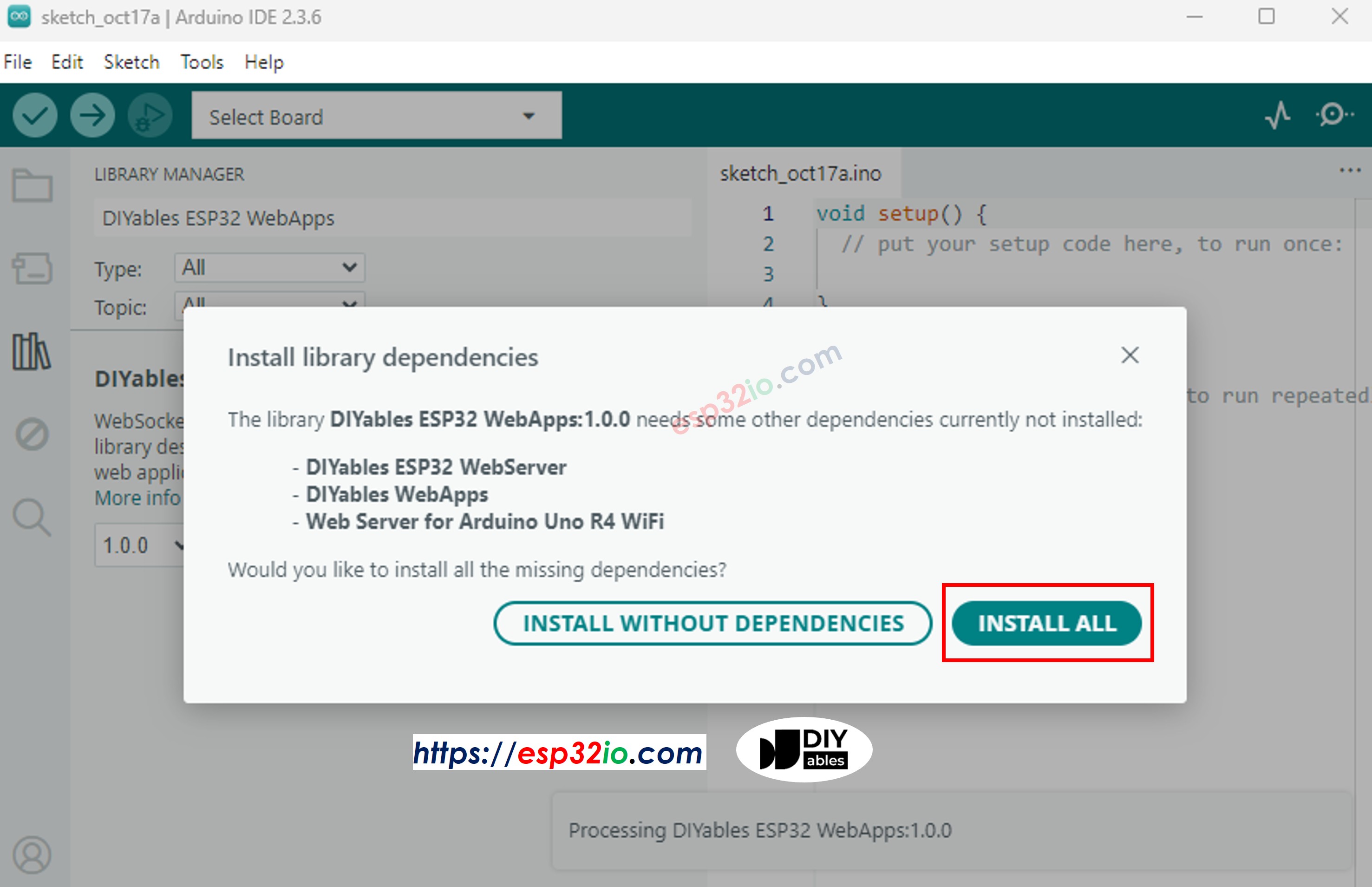
Haz clic en el botón Instalar para instalar la biblioteca.
#include <DIYables_ESP32_Platform.h>
#include <DIYablesWebApps.h>
const char WIFI_SSID[] = "YOUR_WIFI_SSID";
const char WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";
ESP32ServerFactory factory;
DIYablesWebAppServer webAppsServer(factory, 80, 81);
DIYablesHomePage homePage;
DIYablesWebMonitorPage webMonitorPage;
DIYablesWebSliderPage webSliderPage;
DIYablesWebJoystickPage webJoystickPage(false, 5);
DIYablesWebRotatorPage webRotatorPage(ROTATOR_MODE_CONTINUOUS);
DIYablesWebAnalogGaugePage webAnalogGaugePage(0.0, 100.0, "%");
DIYablesWebTablePage webTablePage;
int currentSlider1 = 64;
int currentSlider2 = 128;
int currentJoystickX = 0;
int currentJoystickY = 0;
int currentRotatorAngle = 0;
float currentGaugeValue = 50.0;
void setup() {
Serial.begin(9600);
delay(1000);
Serial.println("DIYables ESP32 WebApp - Multiple Apps Example");
webAppsServer.addApp(&homePage);
webAppsServer.addApp(&webMonitorPage);
webAppsServer.addApp(&webSliderPage);
webAppsServer.addApp(&webJoystickPage);
webAppsServer.addApp(&webRotatorPage);
webAppsServer.addApp(&webAnalogGaugePage);
webAppsServer.addApp(&webTablePage);
webAppsServer.setNotFoundPage(DIYablesNotFoundPage());
webTablePage.addRow("Arduino Status");
webTablePage.addRow("WiFi Connected");
webTablePage.addRow("Uptime");
webTablePage.addRow("Slider 1");
webTablePage.addRow("Slider 2");
webTablePage.addRow("Joystick X");
webTablePage.addRow("Joystick Y");
webTablePage.addRow("Rotator Angle");
webTablePage.addRow("Gauge Value");
if (!webAppsServer.begin(WIFI_SSID, WIFI_PASSWORD)) {
while (1) {
Serial.println("Failed to start WebApp server!");
delay(1000);
}
}
setupCallbacks();
}
void setupCallbacks() {
webMonitorPage.onWebMonitorMessage([](const String& message) {
Serial.println("Web Monitor: " + message);
webMonitorPage.sendToWebMonitor("Arduino received: " + message);
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
currentSlider1 = slider1;
currentSlider2 = slider2;
Serial.print("Slider 1: ");
Serial.print(slider1);
Serial.print(", Slider 2: ");
Serial.println(slider2);
webTablePage.sendValueUpdate("Slider 1", String(slider1));
webTablePage.sendValueUpdate("Slider 2", String(slider2));
currentGaugeValue = map(slider1, 0, 255, 0, 100);
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
char gaugeStr[16];
snprintf(gaugeStr, sizeof(gaugeStr), "%.1f%%", currentGaugeValue);
webTablePage.sendValueUpdate("Gauge Value", String(gaugeStr));
});
webSliderPage.onSliderValueToWeb([]() {
webSliderPage.sendToWebSlider(currentSlider1, currentSlider2);
});
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
currentJoystickX = x;
currentJoystickY = y;
Serial.print("Joystick - X: ");
Serial.print(x);
Serial.print(", Y: ");
Serial.println(y);
Serial.print(x);
Serial.print(", Y: ");
Serial.println(y);
webTablePage.sendValueUpdate("Joystick X", String(x));
webTablePage.sendValueUpdate("Joystick Y", String(y));
}
});
webJoystickPage.onJoystickValueToWeb([]() {
webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY);
});
webRotatorPage.onRotatorAngleFromWeb([](float angle) {
currentRotatorAngle = (int)angle;
Serial.println("Rotator angle: " + String(angle) + "°");
webTablePage.sendValueUpdate("Rotator Angle", String(angle, 0) + "°");
});
webAnalogGaugePage.onGaugeValueRequest([]() {
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
});
webTablePage.onTableValueRequest([]() {
webTablePage.sendValueUpdate("Arduino Status", "Running");
webTablePage.sendValueUpdate("WiFi Connected", "Yes");
webTablePage.sendValueUpdate("Uptime", "0 seconds");
webTablePage.sendValueUpdate("Slider 1", String(currentSlider1));
webTablePage.sendValueUpdate("Slider 2", String(currentSlider2));
webTablePage.sendValueUpdate("Joystick X", String(currentJoystickX));
webTablePage.sendValueUpdate("Joystick Y", String(currentJoystickY));
webTablePage.sendValueUpdate("Rotator Angle", String(currentRotatorAngle) + "°");
webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%");
});
}
void loop() {
webAppsServer.loop();
static unsigned long lastUptimeUpdate = 0;
if (millis() - lastUptimeUpdate > 5000) {
lastUptimeUpdate = millis();
unsigned long uptimeSeconds = millis() / 1000;
String uptimeStr = String(uptimeSeconds) + " seconds";
if (uptimeSeconds >= 60) {
uptimeStr = String(uptimeSeconds / 60) + "m " + String(uptimeSeconds % 60) + "s";
}
webTablePage.sendValueUpdate("Uptime", uptimeStr);
}
static unsigned long lastSensorUpdate = 0;
if (millis() - lastSensorUpdate > 3000) {
lastSensorUpdate = millis();
float sensorValue = 50.0 + 30.0 * sin(millis() / 10000.0);
currentGaugeValue = sensorValue;
webAnalogGaugePage.sendToWebAnalogGauge(currentGaugeValue);
webTablePage.sendValueUpdate("Gauge Value", String(currentGaugeValue, 1) + "%");
}
delay(10);
}
const char WIFI_SSID[] = "YOUR_WIFI_NETWORK";
const char WIFI_PASSWORD[] = "YOUR_WIFI_PASSWORD";
DIYables WebApp - Multiple Apps Example
INFO: Added app /
INFO: Added app /web-monitor
INFO: Added app /web-slider
INFO: Added app /web-joystick
INFO: Added app /web-rotator
INFO: Added app /web-gauge
INFO: Added app /web-table
DIYables WebApp Library
Platform: ESP32
Network connected!
IP address: 192.168.0.2
HTTP server started on port 80
Configuring WebSocket server callbacks...
WebSocket server started on port 81
WebSocket URL: ws://192.168.0.2:81
WebSocket server started on port 81
==========================================
DIYables WebApp Ready!
==========================================
📱 Web Interface: http://192.168.0.2
🔗 WebSocket: ws://192.168.0.2:81
📋 Available Applications:
🏠 Home Page: http://192.168.0.2/
📊 Web Monitor: http://192.168.0.2/web-monitor
🎚️ Web Slider: http://192.168.0.2/web-slider
🕹️ Web Joystick: http://192.168.0.2/web-joystick
🔄 Web Rotator: http://192.168.0.2/web-rotator
⏲️ Web Analog Gauge: http://192.168.0.2/web-gauge
📊 Web Table: http://192.168.0.2/web-table
==========================================
Si no ves nada, reinicia la placa ESP32.
Toma nota de la dirección IP que se muestre y escribe esa dirección en la barra de direcciones de un navegador web en tu teléfono inteligente o PC.
Ejemplo: http://192.168.0.2
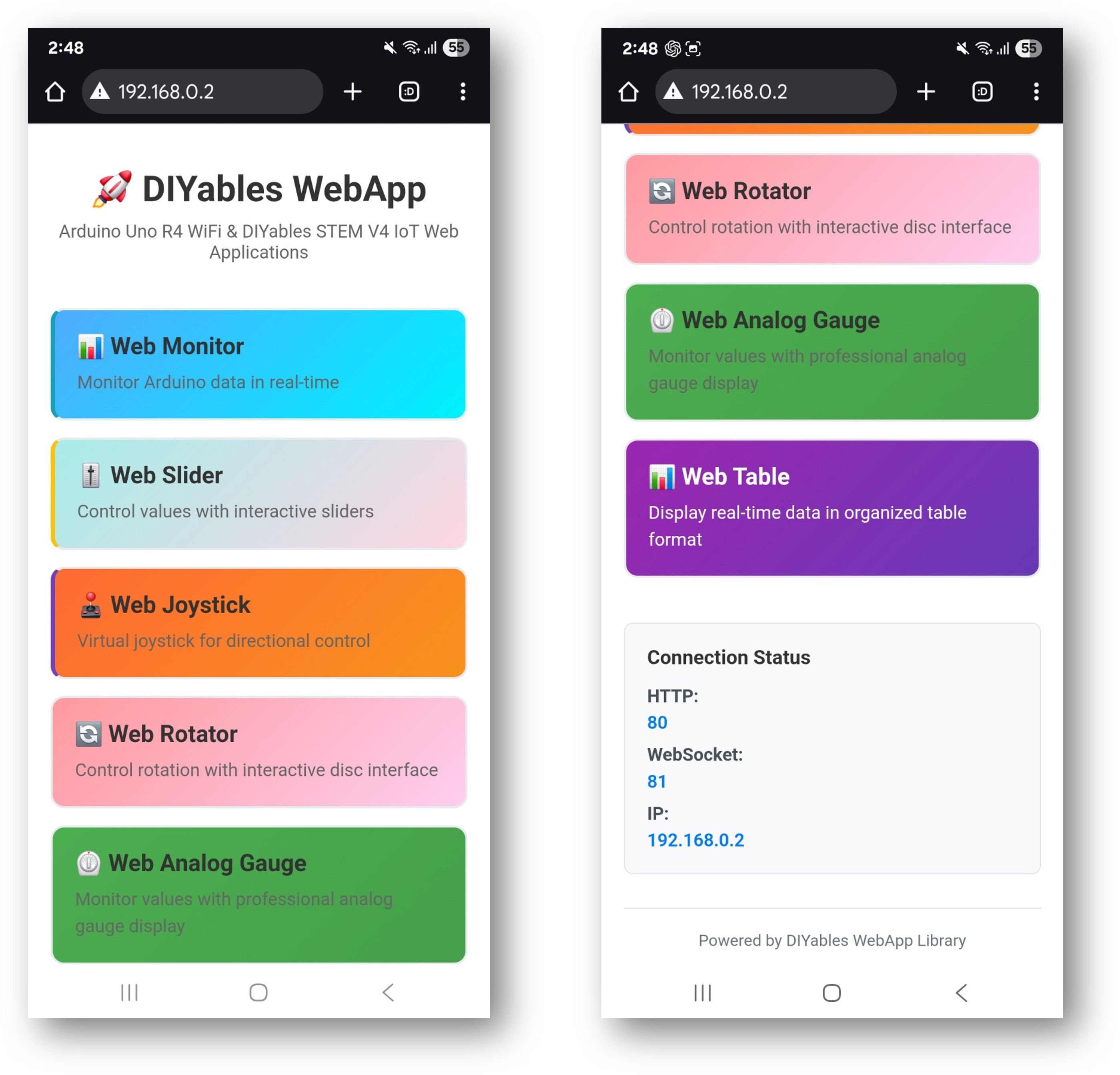
Verás la página de inicio con todas las aplicaciones web tal como se muestra en la imagen a continuación:
Haz clic en cualquier enlace de una aplicación web (Chat, Web Monitor, Web Digital Pins, Web Slider, Web Joystick, etc.), verás la interfaz de usuario de la aplicación web correspondiente.
O también puedes acceder a cada página directamente mediante la dirección IP seguida de la ruta de la aplicación. Por ejemplo: http://192.168.0.2/chat, http://192.168.0.2/web-monitor, etc.
Explora todas las aplicaciones web: intenta chatear con Arduino, monitorea la salida serie, controla los pines digitales, ajusta los deslizadores y usa el joystick virtual para experimentar todas las capacidades de la interfaz web integrada.
La página de inicio sirve como tu centro de control con enlaces a todas las aplicaciones:
Monitor Web: /webmonitor - Interfaz de comunicación serial
Chat: /chat - Mensajería interactiva con Arduino
Pines Digitales: /digital-pins - Control y monitoreo de pines
Deslizador Web: /webslider - Deslizadores de control analógico dual
Joystick Web: /webjoystick - Interfaz de control de posición en 2D
Acceda a cada interfaz directamente:
http://[ARDUINO_IP]/ # Home page
http://[ARDUINO_IP]/webmonitor # Serial monitor interface
http://[ARDUINO_IP]/chat # Chat interface
http://[ARDUINO_IP]/digital-pins # Pin control
http://[ARDUINO_IP]/webslider # Slider controls
http://[ARDUINO_IP]/webjoystick # Joystick control
Este ejemplo completo proporciona una base para tus proyectos creativos. Modifica y adapta las configuraciones a continuación para construir increíbles aplicaciones de IoT que se ajusten a tu visión única.
El ejemplo preconfigura pines específicos para diferentes propósitos:
webDigitalPinsPage.enablePin(2, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(3, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(4, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(13, WEB_PIN_OUTPUT);
webDigitalPinsPage.enablePin(8, WEB_PIN_INPUT);
webDigitalPinsPage.enablePin(9, WEB_PIN_INPUT);
DIYablesWebJoystickPage webJoystickPage(false, 5);
El ejemplo mantiene un estado sincronizado entre todas las interfaces:
int pinStates[16] = { LOW };
int currentSlider1 = 64;
int currentSlider2 = 128;
int currentJoystickX = 0;
int currentJoystickY = 0;
La interfaz de chat incluye varios comandos preprogramados:
hola - Respuesta de saludo amistosa
tiempo - Muestra el tiempo de actividad del ESP32 en segundos
estado - Informa el estado del ESP32 y el estado del LED
ayuda - Lista los comandos disponibles
User: hello
ESP32: Hello! I'm your Arduino. How can I help you?
User: led on
ESP32: Built-in LED is now ON!
User: time
ESP32: I've been running for 1245 seconds.
User: status
ESP32: Status: Running smoothly! LED is ON
#include <Servo.h>
const int MOTOR_LEFT_PWM = 9;
const int MOTOR_RIGHT_PWM = 10;
const int SERVO_PAN = 11;
const int SERVO_TILT = 12;
const int LED_STRIP_PIN = 6;
Servo panServo, tiltServo;
void setup() {
panServo.attach(SERVO_PAN);
tiltServo.attach(SERVO_TILT);
pinMode(MOTOR_LEFT_PWM, OUTPUT);
pinMode(MOTOR_RIGHT_PWM, OUTPUT);
setupRobotCallbacks();
}
void setupRobotCallbacks() {
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
int leftSpeed = y + (x / 2);
int rightSpeed = y - (x / 2);
leftSpeed = constrain(leftSpeed, -100, 100);
rightSpeed = constrain(rightSpeed, -100, 100);
leftSpeed = map(leftSpeed, -100, 100, -currentSlider1, currentSlider1);
rightSpeed = map(rightSpeed, -100, 100, -currentSlider1, currentSlider1);
analogWrite(MOTOR_LEFT_PWM, abs(leftSpeed));
analogWrite(MOTOR_RIGHT_PWM, abs(rightSpeed));
Serial.println("Robot - Left: " + String(leftSpeed) + ", Right: " + String(rightSpeed));
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
int panAngle = map(currentJoystickX, -100, 100, 0, 180);
int tiltAngle = map(slider2, 0, 255, 0, 180);
panServo.write(panAngle);
tiltServo.write(tiltAngle);
Serial.println("Camera - Pan: " + String(panAngle) + "°, Tilt: " + String(tiltAngle) + "°");
});
webDigitalPinsPage.onPinWrite([](int pin, int state) {
switch (pin) {
case 2:
digitalWrite(pin, state);
Serial.println("Headlights " + String(state ? "ON" : "OFF"));
break;
case 3:
if (state) {
digitalWrite(pin, HIGH);
delay(200);
digitalWrite(pin, LOW);
}
break;
case 4:
if (state) {
analogWrite(MOTOR_LEFT_PWM, 0);
analogWrite(MOTOR_RIGHT_PWM, 0);
Serial.println("EMERGENCY STOP ACTIVATED");
}
break;
}
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("stop") >= 0) {
analogWrite(MOTOR_LEFT_PWM, 0);
analogWrite(MOTOR_RIGHT_PWM, 0);
chatPage.sendToChat("Robot stopped!");
return;
}
if (msg.indexOf("center camera") >= 0) {
panServo.write(90);
tiltServo.write(90);
chatPage.sendToChat("Camera centered!");
return;
}
if (msg.indexOf("speed") >= 0) {
String response = "Current max speed: " + String(map(currentSlider1, 0, 255, 0, 100)) + "%";
chatPage.sendToChat(response);
return;
}
chatPage.sendToChat("Robot commands: stop, center camera, speed");
});
}
const int LIVING_ROOM_LIGHTS = 2;
const int BEDROOM_LIGHTS = 3;
const int KITCHEN_LIGHTS = 4;
const int FAN_CONTROL = 9;
const int AC_CONTROL = 10;
const int MOTION_SENSOR = 8;
const int DOOR_SENSOR = 9;
void setupHomeAutomation() {
pinMode(LIVING_ROOM_LIGHTS, OUTPUT);
pinMode(BEDROOM_LIGHTS, OUTPUT);
pinMode(KITCHEN_LIGHTS, OUTPUT);
pinMode(FAN_CONTROL, OUTPUT);
pinMode(AC_CONTROL, OUTPUT);
pinMode(MOTION_SENSOR, INPUT);
pinMode(DOOR_SENSOR, INPUT_PULLUP);
webDigitalPinsPage.onPinWrite([](int pin, int state) {
digitalWrite(pin, state);
String room;
switch (pin) {
case 2: room = "Living Room"; break;
case 3: room = "Bedroom"; break;
case 4: room = "Kitchen"; break;
default: room = "Pin " + String(pin); break;
}
Serial.println(room + " lights " + String(state ? "ON" : "OFF"));
String message = room + " lights turned " + String(state ? "ON" : "OFF");
chatPage.sendToChat(message);
});
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
analogWrite(FAN_CONTROL, slider1);
analogWrite(AC_CONTROL, slider2);
Serial.println("Fan: " + String(map(slider1, 0, 255, 0, 100)) + "%, " +
"AC: " + String(map(slider2, 0, 255, 0, 100)) + "%");
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("all lights on") >= 0) {
digitalWrite(LIVING_ROOM_LIGHTS, HIGH);
digitalWrite(BEDROOM_LIGHTS, HIGH);
digitalWrite(KITCHEN_LIGHTS, HIGH);
chatPage.sendToChat("All lights turned ON!");
return;
}
if (msg.indexOf("all lights off") >= 0) {
digitalWrite(LIVING_ROOM_LIGHTS, LOW);
digitalWrite(BEDROOM_LIGHTS, LOW);
digitalWrite(KITCHEN_LIGHTS, LOW);
chatPage.sendToChat("All lights turned OFF!");
return;
}
if (msg.indexOf("temperature") >= 0) {
String response = "Fan: " + String(map(currentSlider1, 0, 255, 0, 100)) + "%, " +
"AC: " + String(map(currentSlider2, 0, 255, 0, 100)) + "%";
chatPage.sendToChat(response);
return;
}
if (msg.indexOf("security") >= 0) {
bool motion = digitalRead(MOTION_SENSOR);
bool door = digitalRead(DOOR_SENSOR);
String status = "Motion: " + String(motion ? "DETECTED" : "CLEAR") +
", Door: " + String(door ? "CLOSED" : "OPEN");
chatPage.sendToChat(status);
return;
}
chatPage.sendToChat("Home commands: all lights on/off, temperature, security");
});
}
void loop() {
server.loop();
static bool lastMotion = false;
static bool lastDoor = false;
bool currentMotion = digitalRead(MOTION_SENSOR);
bool currentDoor = digitalRead(DOOR_SENSOR);
if (currentMotion != lastMotion) {
if (currentMotion) {
chatPage.sendToChat("🚨 MOTION DETECTED!");
webMonitorPage.sendToWebMonitor("Security Alert: Motion detected");
}
lastMotion = currentMotion;
}
if (currentDoor != lastDoor) {
String status = currentDoor ? "CLOSED" : "OPENED";
chatPage.sendToChat("🚪 Door " + status);
webMonitorPage.sendToWebMonitor("Security: Door " + status);
lastDoor = currentDoor;
}
delay(10);
}
const int HEATING_ELEMENT = 9;
const int COOLING_FAN = 10;
const int STIRRER_MOTOR = 11;
const int TEMP_SENSOR_PIN = A0;
const int PH_SENSOR_PIN = A1;
void setupScienceExperiment() {
webSliderPage.onSliderValueFromWeb([](int slider1, int slider2) {
int targetTemp = map(slider1, 0, 255, 20, 80);
analogWrite(STIRRER_MOTOR, slider2);
int currentTemp = readTemperature();
if (currentTemp < targetTemp) {
analogWrite(HEATING_ELEMENT, 200);
analogWrite(COOLING_FAN, 0);
} else if (currentTemp > targetTemp + 2) {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 255);
} else {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 0);
}
Serial.println("Target: " + String(targetTemp) + "°C, Current: " + String(currentTemp) + "°C");
});
chatPage.onChatMessage([](const String& message) {
String msg = message;
msg.toLowerCase();
if (msg.indexOf("data") >= 0) {
int temp = readTemperature();
float ph = readPH();
String data = "Temperature: " + String(temp) + "°C, pH: " + String(ph, 2);
chatPage.sendToChat(data);
return;
}
if (msg.indexOf("start") >= 0) {
chatPage.sendToChat("🔬 Experiment started! Monitoring conditions...");
return;
}
if (msg.indexOf("stop") >= 0) {
analogWrite(HEATING_ELEMENT, 0);
analogWrite(COOLING_FAN, 0);
analogWrite(STIRRER_MOTOR, 0);
chatPage.sendToChat("⚠️ Experiment stopped - all systems OFF");
return;
}
chatPage.sendToChat("Science commands: data, start, stop");
});
webMonitorPage.onWebMonitorMessage([](const String& message) {
if (message == "log") {
int temp = readTemperature();
float ph = readPH();
String logEntry = String(millis()) + "," + String(temp) + "," + String(ph, 2);
webMonitorPage.sendToWebMonitor(logEntry);
}
});
}
int readTemperature() {
int sensorValue = analogRead(TEMP_SENSOR_PIN);
return map(sensorValue, 0, 1023, 0, 100);
}
float readPH() {
int sensorValue = analogRead(PH_SENSOR_PIN);
return map(sensorValue, 0, 1023, 0, 14) / 10.0;
}
void synchronizeAllStates() {
webSliderPage.sendToWebSlider(currentSlider1, currentSlider2);
webJoystickPage.sendToWebJoystick(currentJoystickX, currentJoystickY);
for (int pin = 0; pin <= 13; pin++) {
if (webDigitalPinsPage.isPinEnabled(pin)) {
webDigitalPinsPage.updatePinState(pin, pinStates[pin]);
}
}
Serial.println("All interface states synchronized");
}
void setupCrossInterfaceCommunication() {
webJoystickPage.onJoystickValueFromWeb([](int x, int y) {
float distance = sqrt(x*x + y*y);
if (distance > 50) {
int maxValue = map(distance, 50, 100, 255, 128);
}
});
webDigitalPinsPage.onPinWrite([](int pin, int state) {
if (pin == 2 && state == HIGH) {
chatPage.sendToChat("📢 System armed - additional commands available");
} else if (pin == 2 && state == LOW) {
chatPage.sendToChat("📢 System disarmed - limited commands only");
}
});
}
Algunas interfaces no se cargan
Verifique que todas las aplicaciones estén añadidas al servidor en setup()
Verifique las conexiones WebSocket en la consola del navegador
Asegúrese de tener suficiente memoria para todas las interfaces
Indica inconsistencias entre interfaces.
Implementar callbacks de sincronización de estado
Usar variables globales compartidas para el seguimiento del estado
Llamar a las funciones de sincronización después de cambios importantes en el estado
3. Problemas de rendimiento con múltiples interfaces
Reducir las frecuencias de actualización de interfaces no críticas
Implementar actualizaciones selectivas basadas en la interfaz activa
Considerar deshabilitar interfaces no utilizadas para proyectos específicos
Limitaciones de memoria
Monitorear la RAM disponible con Serial.print(freeMemory())
Deshabilitar interfaces no utilizadas si la memoria es limitada
Optimizar las funciones de callback para minimizar el uso de memoria
void debugSystemState() {
Serial.println("=== System State Debug ===");
Serial.println("Free Memory: " + String(freeMemory()) + " bytes");
Serial.println("Digital Pins:");
for (int pin = 0; pin <= 13; pin++) {
if (webDigitalPinsPage.isPinEnabled(pin)) {
Serial.println(" Pin " + String(pin) + ": " + String(pinStates[pin] ? "HIGH" : "LOW"));
}
}
Serial.println("Sliders: " + String(currentSlider1) + ", " + String(currentSlider2));
Serial.println("Joystick: X=" + String(currentJoystickX) + ", Y=" + String(currentJoystickY));
Serial.println("========================");
}
void optimizeMemoryUsage() {
}
void controlUpdateFrequency() {
static unsigned long lastSlowUpdate = 0;
static unsigned long lastFastUpdate = 0;
if (millis() - lastFastUpdate > 10) {
lastFastUpdate = millis();
}
if (millis() - lastSlowUpdate > 1000) {
lastSlowUpdate = millis();
}
}
Después de dominar el ejemplo MultipleWebApps:
Personaliza para tu proyecto: Elimina interfaces no utilizadas y añade lógica específica del proyecto
Añade sensores: Integra lecturas reales de sensores para el monitoreo de entradas
Implementa seguridad: Añade paradas de emergencia y bloqueos de seguridad
Crea comandos personalizados: Extiende la interfaz de chat con comandos específicos del proyecto
Añade registro de datos: Utiliza un monitor web para almacenamiento permanente de datos
Optimización móvil: Prueba y optimiza para el uso en dispositivos móviles
Para obtener ayuda adicional:
Consulta la documentación de los ejemplos individuales (Chat_Example.txt, WebMonitor_Example.txt, etc.)
Revisa la documentación de la API
Visita los tutoriales de DIYables: https://esp32io.com/tutorials/diyables-esp32-webapps
Foros de la comunidad ESP32
Este ejemplo integral proporciona la base para prácticamente cualquier proyecto ESP32 controlado por la web. ¡Comienza con esta plantilla y personalízala para tus necesidades específicas!