ESP8266 - servomotor con potenciómetro
Este tutorial te enseña cómo usar el ESP8266 para controlar el ángulo de un servomotor basado en el valor de entrada de un potenciómetro. En detalle, aprenderemos:
- Cómo conectar el potenciómetro y el servomotor al ESP8266
- Cómo programar el ESP8266 para leer el valor de un potenciómetro y controlar un servomotor en consecuencia.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del servomotor y del potenciómetro
Si no estás familiarizado con motores servo y potenciómetros, incluyendo la disposición de pines, su funcionamiento y la programación, los siguientes tutoriales serán útiles:
Diagrama de Cableado
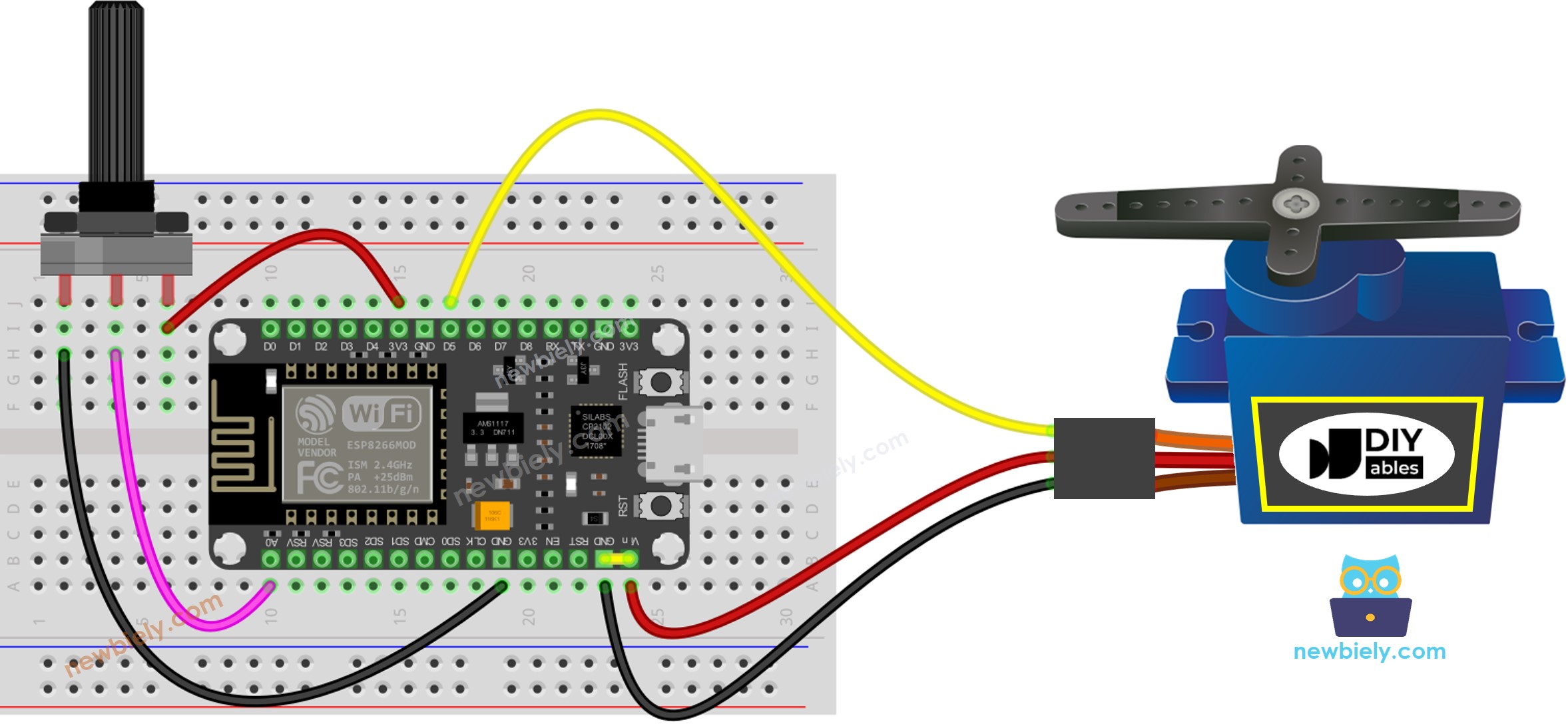
This image is created using Fritzing. Click to enlarge image
Para obtener m\u00e1s informaci\u00f3n, consulte Pines del ESP8266 y c\u00f3mo alimentar ESP8266 y otros componentes.
Para simplificar, el diagrama de cableado anterior se utiliza con fines de prueba o aprendizaje y para un motor servo de par bajo. En realidad, recomendamos encarecidamente usar una fuente de alimentación externa para el motor servo. El diagrama de cableado a continuación ilustra cómo conectar el motor servo a una fuente de alimentación externa.

This image is created using Fritzing. Click to enlarge image
Cómo programar
- Lee el valor del potenciómetro (que va de 0 a 1023)
- Convierte eso en un ángulo en el rango de 0 a 180.
- Controla el servomotor al ángulo especificado.
Código ESP8266
Pasos R\u00e1pidos
Para empezar con ESP8266 en el IDE de Arduino, siga estos pasos:
- Consulta el tutorial cómo configurar el entorno para ESP8266 en Arduino IDE si es la primera vez que usas ESP8266.
- Conecta los componentes tal como se muestra en el diagrama.
- Conecta la placa ESP8266 a tu computadora usando un cable USB.
- Abre el IDE de Arduino en tu computadora.
- Elige la placa ESP8266 correcta, como (p. ej. NodeMCU 1.0 (ESP-12E Module)), y su puerto COM respectivo.
- Conecta tu ESP8266 a tu computadora usando un cable USB.
- Inicia el IDE de Arduino, elige la placa y el puerto apropiados.
- Copia el código anterior y ábrelo en el IDE de Arduino.
- Haz clic en el Subir botón en el IDE de Arduino para transferir el código al ESP8266.
- Abrir el Monitor Serial
- Gira el potenciómetro
- Comprueba la rotación del servomotor
- Ver el resultado en el Monitor Serial
Explicación del código
¡Consulta la explicación línea por línea contenida en los comentarios del código fuente!
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.