ESP8266 - 28BYJ-48 motor paso a paso con controlador ULN2003
Este tutorial te enseña cómo usar ESP8266 para controlar el motor paso a paso 28BYJ-48 utilizando un controlador ULN2003. En detalle, aprenderemos:
- Cómo conectar ESP8266 al motor paso a paso 28BYJ-48 mediante el controlador ULN2003
- Cómo programar ESP8266 para controlar un motor paso a paso 28BYJ-48 mediante el controlador ULN2003
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
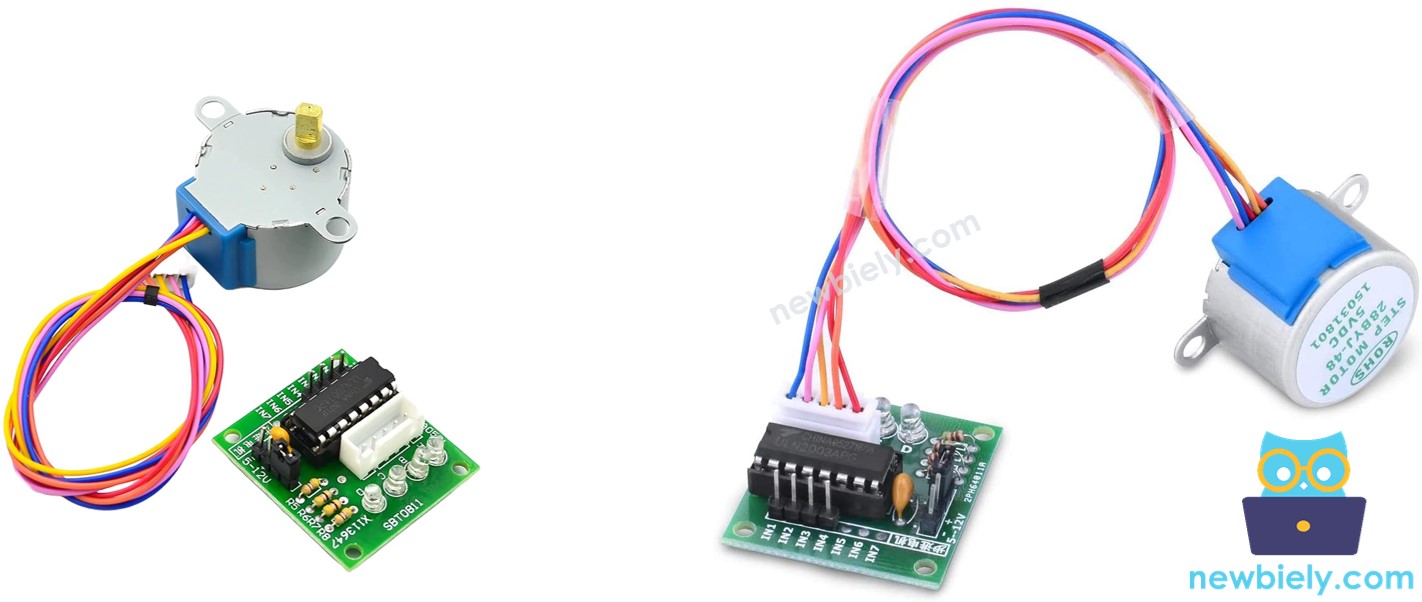
Acerca del motor paso a paso 28BYJ-48
Los motores paso a paso son ideales para el control de posición. Dividen una revolución completa en un conjunto de pasos iguales. Estos motores se utilizan en una variedad de dispositivos, entre ellos impresoras, impresoras 3D, máquinas CNC y automatización industrial.
Uno de los métodos más económicos para adquirir conocimiento sobre motores paso a paso es utilizar motores paso a paso 28BYJ-48. Estos suelen venir con una placa de controlador basada en ULN2003, lo que facilita su uso.
Como se indica en la ficha técnica, el motor 28BYJ-48 opera en modo de paso completo, con cada paso representando una rotación de 11,25°. Por lo tanto, hay 32 pasos en una revolución (360°/11,25° = 32).
Además, el motor tiene un conjunto de engranajes de reducción de 1/64. Esto se traduce en 32 x 64 = 2048 pasos. Cada paso equivale a 360°/2048 = 0,1758°.
Conclusión: Si el motor está configurado en modo de paso completo, tomará 2048 pasos para completar una revolución.
Asignación de pines del motor paso a paso 28BYJ-48 utilizando el controlador ULN2003
El motor paso a paso 28BYJ-48 tiene 5 pines. No es necesario preocuparse por los detalles de estos pines. Todo lo que necesitamos hacer es conectarlo al conector del controlador de motor ULN2003.
Acerca del módulo controlador ULN2003 para motor paso a paso
El ULN2003 es un módulo controlador de motor muy utilizado para motores paso a paso.
- Cuenta con cuatro LEDs que muestran la actividad de cuatro líneas de entrada de control, lo que proporciona un efecto impresionante cuando el motor está en movimiento.
- Además, incluye un puente ON/OFF para separar la fuente de alimentación del motor paso a paso.
Disposición de pines de ULN2003
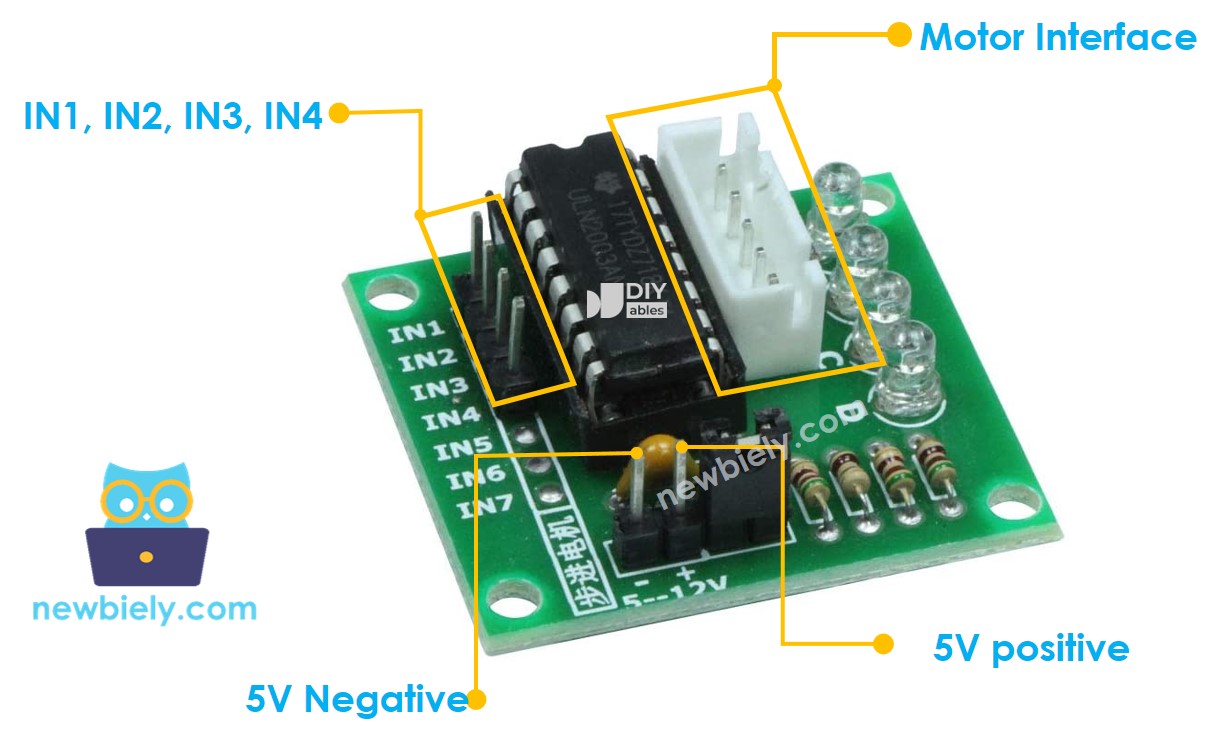
El módulo ULN2003 tiene 6 pines y un conector hembra:
- IN1: Este pin se utiliza para accionar el motor y debe estar conectado a un pin de salida en el ESP8266.
- IN2: Este pin se utiliza para accionar el motor y debe estar conectado a un pin de salida en el ESP8266.
- IN3: Este pin se utiliza para accionar el motor y debe estar conectado a un pin de salida en el ESP8266.
- IN4: Este pin se utiliza para accionar el motor y debe estar conectado a un pin de salida en el ESP8266.
- GND: Este es un pin de tierra común y debe conectarse a ambas tierras del ESP8266 y de la fuente de alimentación externa.
- VDD: Este pin suministra energía para el motor y debe conectarse a la fuente de alimentación externa.
- Conector del motor: Aquí se conecta el motor.
※ Nota:
- La tensión de la fuente de alimentación externa debe coincidir con la tensión del motor paso a paso. Por ejemplo, si un motor paso a paso funciona con 12 V CC, debe usarse una fuente de alimentación de 12 V CC. En el caso de un motor paso a paso 28BYJ-48, que funciona con 5 V CC, debe usarse una fuente de 5 V CC.
- Sin embargo, incluso si el motor paso a paso necesita una fuente de 5 V, el pin VDD NO debe conectarse al pin de 5 V en el ESP8266. En su lugar, debe conectarse a una fuente de alimentación externa de 5 V, ya que el motor paso a paso consume demasiada energía.
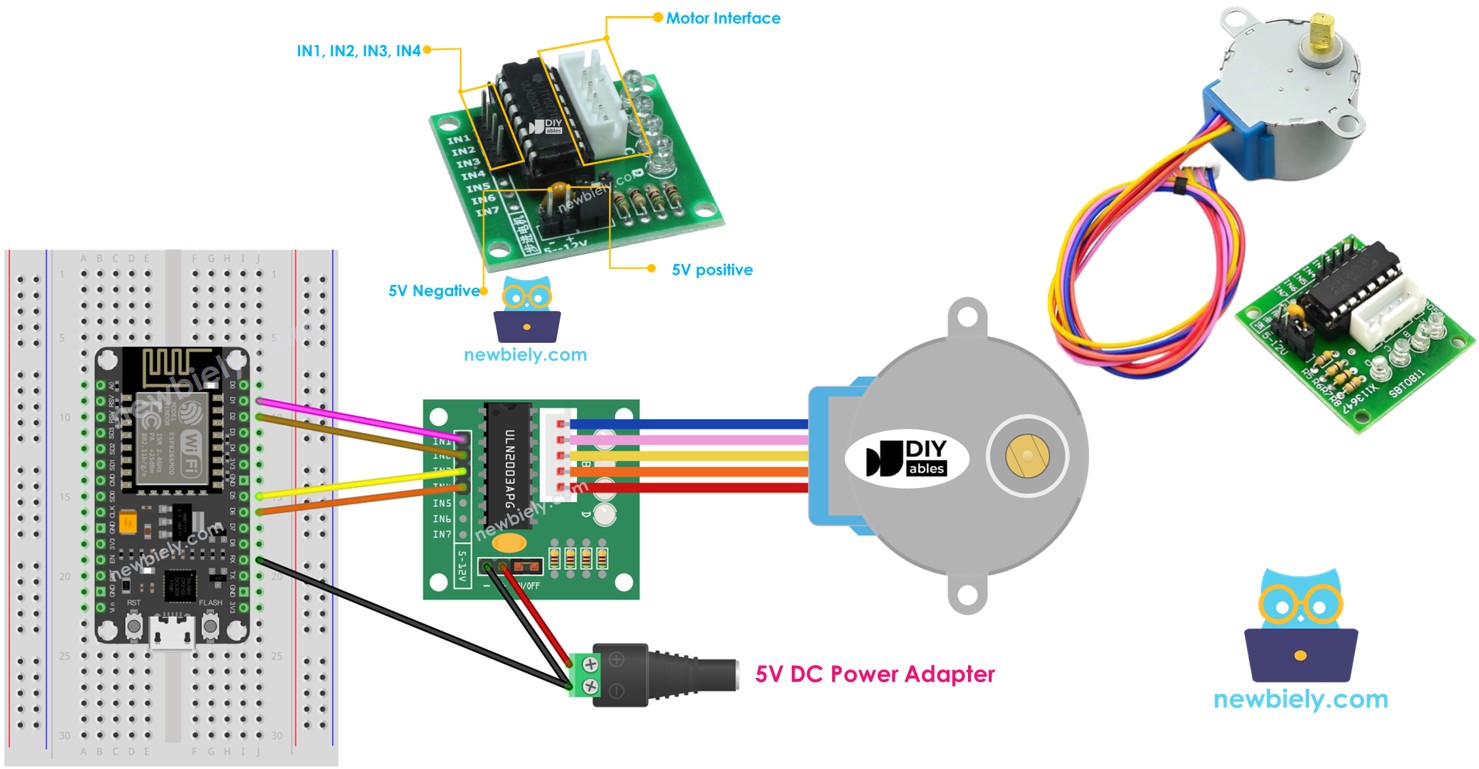
Diagrama de Cableado
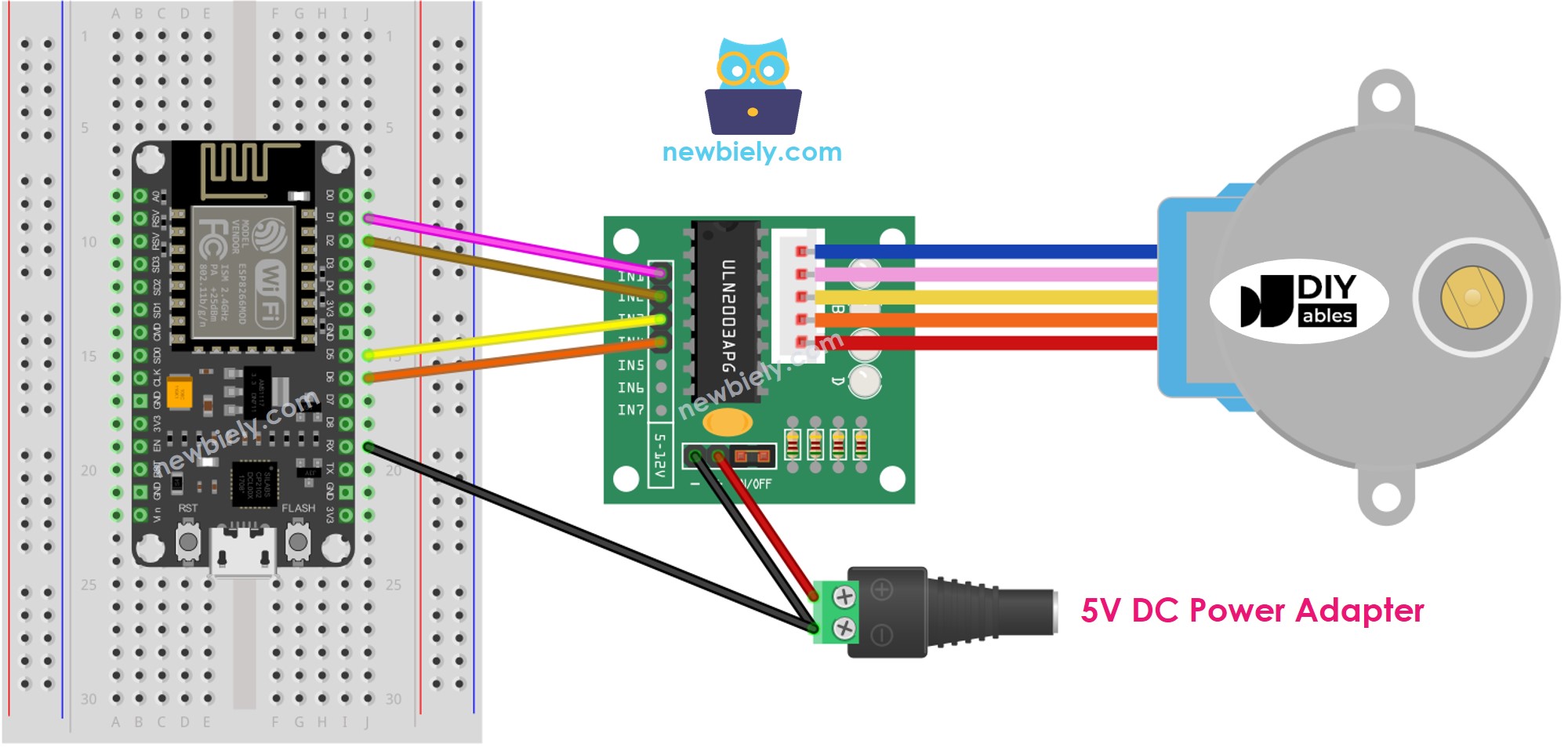
This image is created using Fritzing. Click to enlarge image
Para obtener m\u00e1s informaci\u00f3n, consulte Pines del ESP8266 y c\u00f3mo alimentar ESP8266 y otros componentes.
No es necesario tener en cuenta el color de los cables del motor paso a paso. Solo necesitamos enchufar el conector macho del motor paso a paso 28BYJ-48 al conector hembra del controlador ULN2003.
Cómo programar para controlar un motor paso a paso
Hay tres formas de controlar un motor paso a paso:
- Paso completo
- Medio paso
- Micro-paso
Para aplicaciones básicas, podemos usar el método de paso completo. Los detalles de los tres métodos se discutirán en la parte final de este tutorial. Programar estos métodos puede ser complejo. Afortunadamente, hay muchas bibliotecas que ya han hecho el trabajo por nosotros, así que todo lo que necesitamos hacer es utilizar la biblioteca.
El IDE de Arduino incluye una biblioteca Stepper. Sin embargo, no recomendamos utilizar esta biblioteca por las siguientes razones:
- La biblioteca es bloqueante, lo que significa que impide que el ESP8266 realice otras tareas mientras controla el motor paso a paso.
- No ofrece suficientes funciones.
En su lugar, recomendamos usar la biblioteca AccelStepper. Esta biblioteca ofrece:
- Aceleración
- Desaceleración
- Conducción en pasos completos y a medio paso
- La capacidad de controlar varios motores paso a paso de forma independiente
- Desventaja: No admite la conducción en micro-pasos.
Código ESP8266
Pasos R\u00e1pidos
Para empezar con ESP8266 en el IDE de Arduino, siga estos pasos:
- Consulta el tutorial cómo configurar el entorno para ESP8266 en Arduino IDE si es la primera vez que usas ESP8266.
- Conecta los componentes tal como se muestra en el diagrama.
- Conecta la placa ESP8266 a tu computadora mediante un cable USB.
- Abre Arduino IDE en tu computadora.
- Selecciona la placa ESP8266 correcta, por ejemplo (p. ej. NodeMCU 1.0 (ESP-12E Module)), y su puerto COM correspondiente.
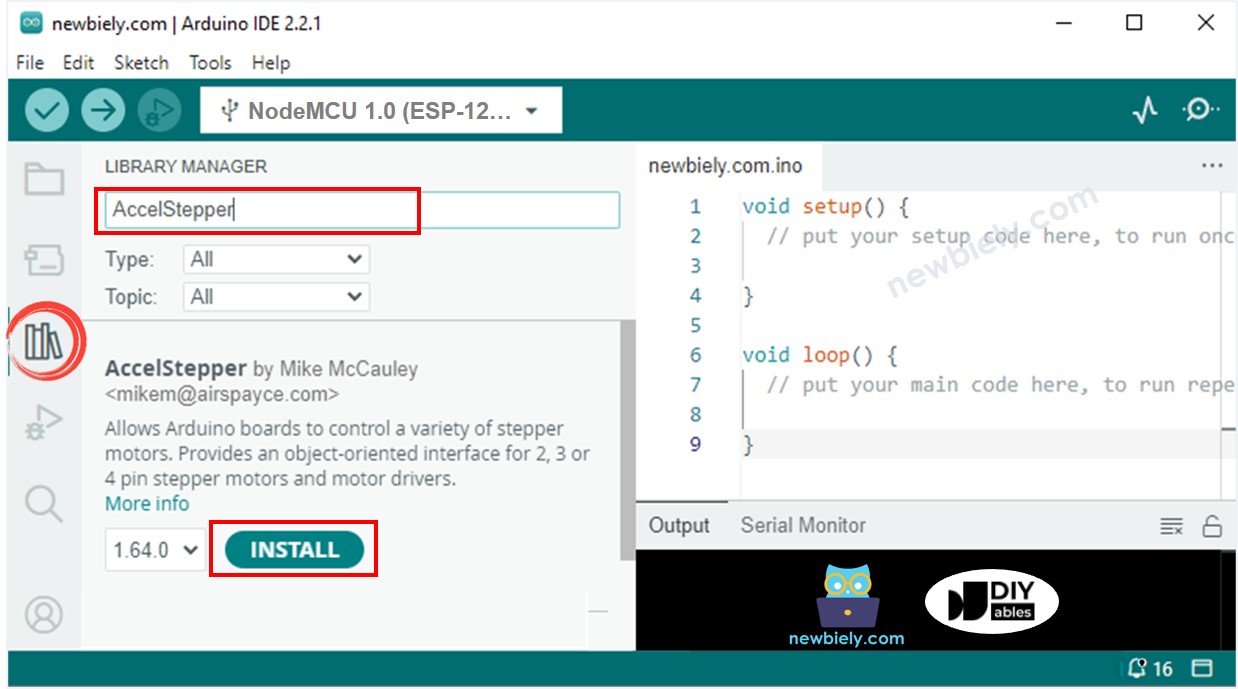
- Haz clic en el icono de Bibliotecas en la barra izquierda del IDE de Arduino.
- Busca “AccelStepper” y localiza la biblioteca AccelStepper creada por Mike McCauley.
- Luego, pulsa el botón Instalar para instalar la biblioteca AccelStepper.
- Copia el código y ábrelo con el IDE de Arduino.
- Haz clic en el botón Subir para subir el código al ESP8266.
- Observa cómo gira el motor.
- Debe girar una vuelta en sentido horario, seguida de dos vueltas en sentido antihorario, y luego dos vueltas en sentido horario.
El procedimiento se realiza continuamente.
- Monitorea el resultado en el Monitor Serial.
Conocimientos Adicionales
1. El motor paso a paso vibra mientras se mueve
No te preocupes si el motor paso a paso tiembla mientras está en movimiento. Esta es una característica típica del motor paso a paso. Podemos reducir la vibración utilizando la técnica de control por micropasos.
Además, debido a esta característica, si se gestiona con precisión, el motor paso a paso puede generar tonos musicales como si fuera un instrumento musical. Un ejemplo de esto se puede encontrar aquí en Hackster.io.
2. Método de control de motores paso a paso
- Paso completo: La unidad de movimiento es un paso, que equivale al valor en grados especificado en la hoja de datos o en el manual del motor paso a paso.
- Paso medio: Cada paso completo se divide en dos pasos más pequeños. La unidad de movimiento es la mitad del paso completo. Este método permite que el motor se mueva con el doble de resolución.
- Micro-paso: Cada paso completo se divide en muchos pasos más pequeños. La unidad de movimiento es una fracción del paso completo. La fracción puede ser 1/4, 1/8, 1/16, 1/32 o incluso más. Este método permite que el motor se mueva con una mayor resolución. También hace que el motor se mueva con mayor suavidad a bajas velocidades. Cuanto mayor sea el denominador, mayor será la resolución y más suave será el movimiento.
Si la hoja de datos del motor especifica 1,8 grados por paso:
- Paso completo: El motor puede moverse en incrementos de 1,8 grados por paso, lo que resulta en 200 pasos por revolución.
- Paso medio: El motor puede moverse en incrementos de 0,9 grados por paso, lo que resulta en 400 pasos por revolución.
- Micro-paso: El motor puede moverse en incrementos de 0,45, 0,225, 0,1125, 0,05625 grados por paso, lo que resulta en 800, 1600, 3200, 6400 pasos por revolución.
El código anterior utilizó la técnica de control de paso completo.
3. Problema de resonancia
Esto es para usuarios avanzados. Los principiantes no necesitan tomar nota de ello. Ocurre en un rango de velocidades, donde la tasa de pasos es igual a la frecuencia natural del motor. Podría haber un cambio notable en el ruido que emite el motor, así como un aumento en la vibración. En aplicaciones reales, los desarrolladores deben estar al tanto de esto.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.