ESP8266 - Interruptor de fin de carrera para motor DC
En este tutorial de ESP8266, vamos a aprender a usar ESP8266 para controlar un motor de corriente continua mediante un interruptor de fin de carrera y un controlador L298N. En detalle, vamos a aprender:
- Cómo detener un motor de corriente continua cuando se acciona un interruptor de límite
- Cómo cambiar la dirección de un motor de corriente continua cuando se acciona un interruptor de límite
- Cómo cambiar la dirección de un motor de corriente continua cuando se activan dos interruptores de límite
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca de motor de corriente continua y interruptor de fin de carrera
Si no sabes sobre motor de corriente continua y interruptor de fin de carrera (diagrama de pines, cómo funciona, cómo programarlo...), aprende sobre ellos en los siguientes tutoriales:
- ESP8266 - Limit Switch tutorial
- ESP8266 - Controls DC Motor tutorial
Diagrama de Cableado
Este tutorial proporciona los códigos de ESP8266 para dos casos: un motor de CC y un interruptor de límite; un motor de CC y dos interruptores de límite.
- Diagrama de cableado entre el motor de corriente continua y un interruptor de fin de carrera
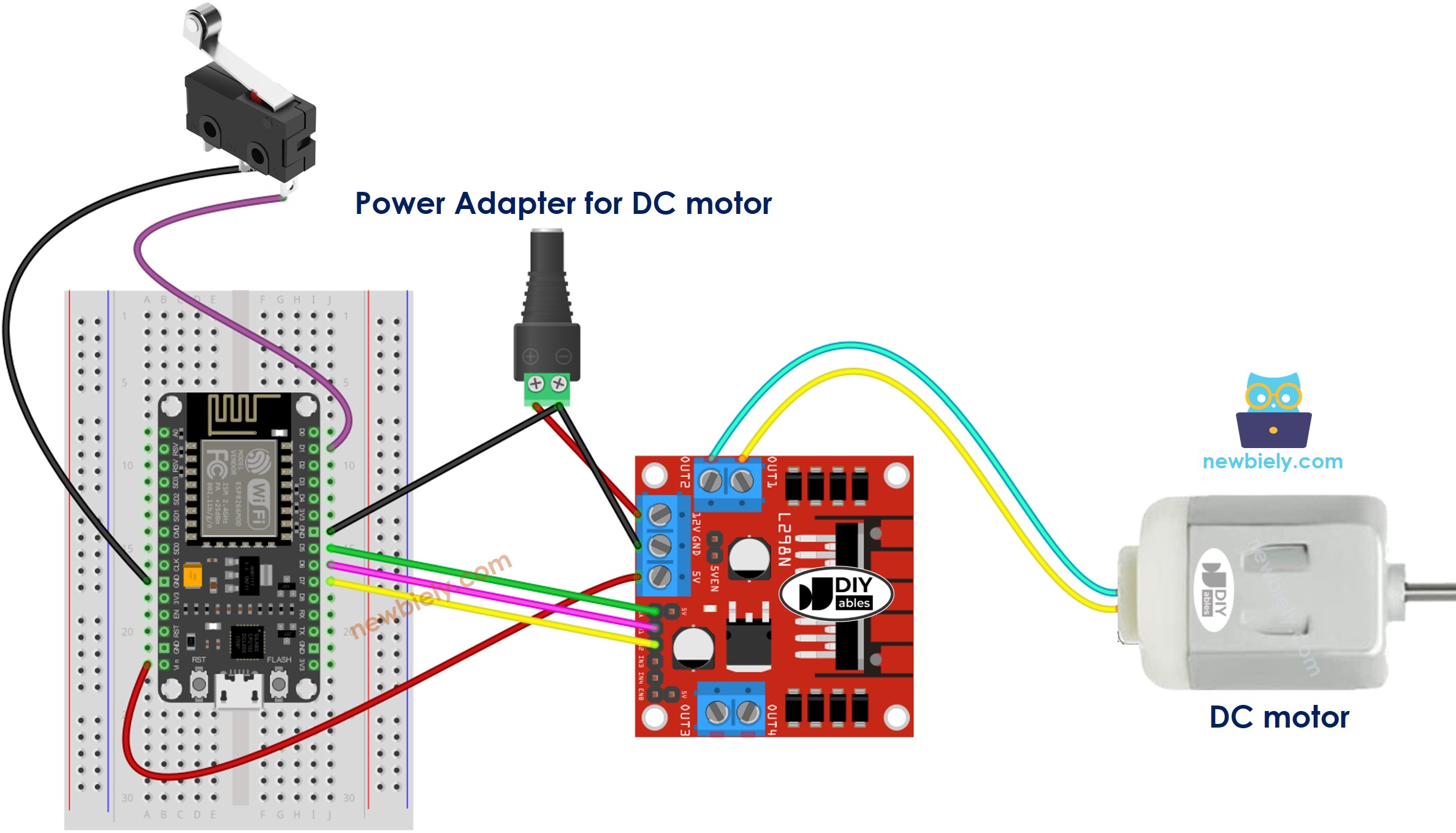
This image is created using Fritzing. Click to enlarge image
Para obtener m\u00e1s informaci\u00f3n, consulte Pines del ESP8266 y c\u00f3mo alimentar ESP8266 y otros componentes.
- Diagrama de cableado entre el motor de CC y dos finales de carrera
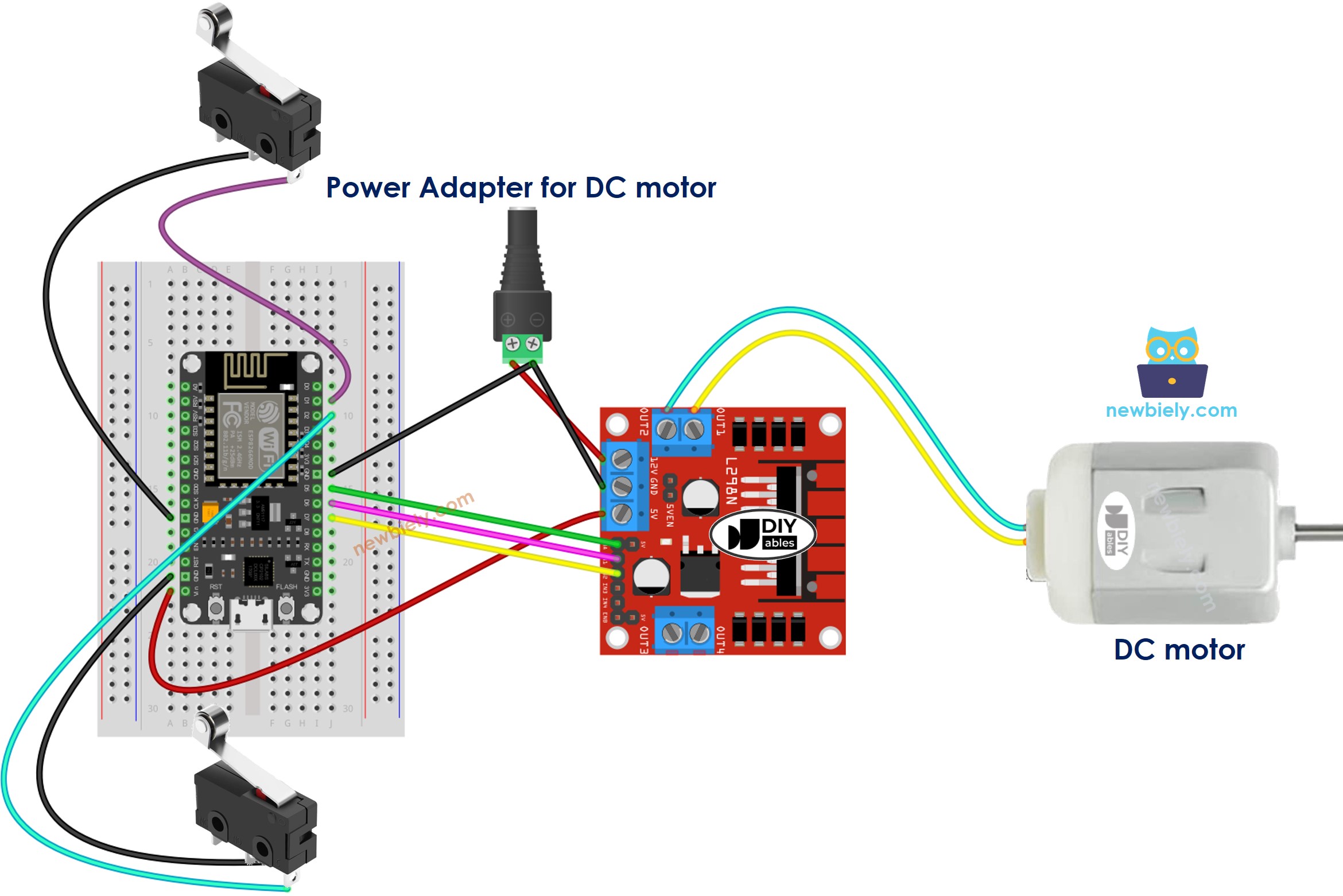
This image is created using Fritzing. Click to enlarge image
Código ESP8266 - Detener un motor de corriente continua mediante un interruptor de fin de carrera
El código mostrado a continuación hace que un motor de corriente continua gire indefinidamente y se detenga inmediatamente cuando se acciona un interruptor de fin de carrera.
Pasos R\u00e1pidos
Para empezar con ESP8266 en el IDE de Arduino, siga estos pasos:
- Consulta el cómo configurar el entorno para ESP8266 en Arduino IDE tutorial si es tu primera vez usando ESP8266.
- Conecta los componentes tal como se muestra en el diagrama.
- Conecta la placa ESP8266 a tu computadora usando un cable USB.
- Abre Arduino IDE en tu computadora.
- Selecciona la placa ESP8266 correcta, como (por ejemplo NodeMCU 1.0 (ESP-12E Module)), y su puerto COM correspondiente.
- Conecta ESP8266 al PC mediante un cable USB.
- Abre Arduino IDE, selecciona la placa y el puerto correctos.
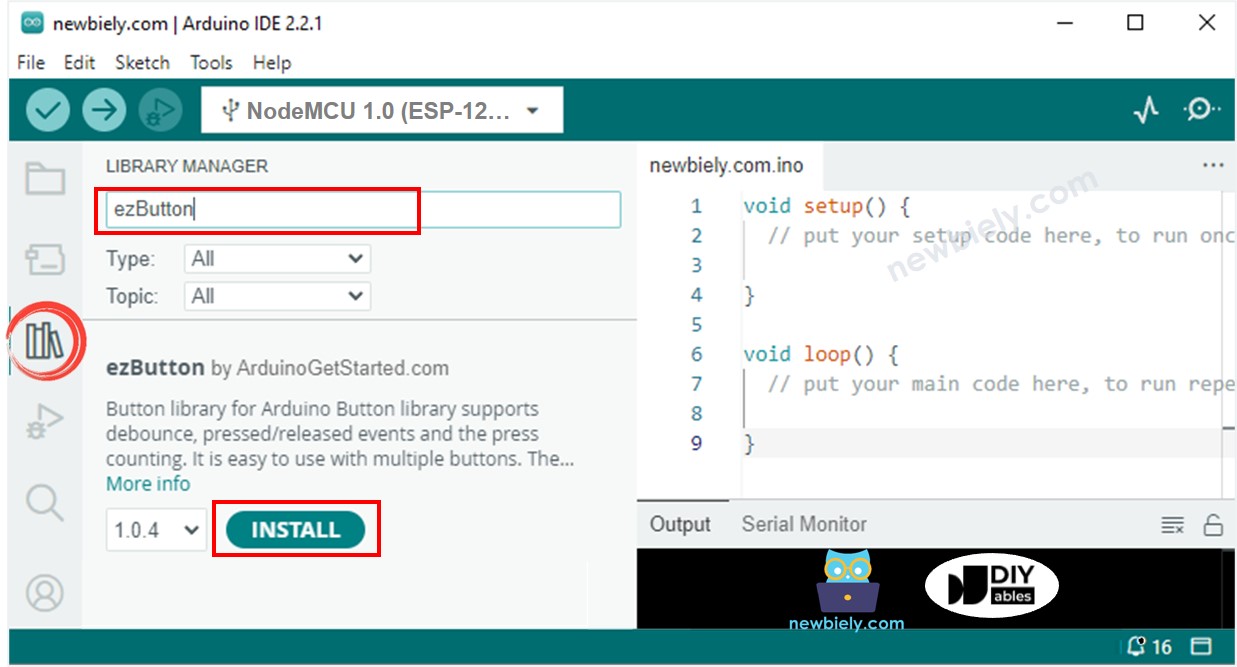
- Haz clic en el ícono Libraries en la barra izquierda del IDE de Arduino.
- Busca “ezButton”, luego encuentra la biblioteca ezButton de ESP8266GetStarted.com.
- Haz clic en el botón Install para instalar la biblioteca ezButton.
- Copie el código anterior y ábralo con Arduino IDE
- Haga clic en el botón Subir en Arduino IDE para subir el código al ESP8266
- Si el cableado es correcto, verá que el motor gira en sentido horario.
- Toque el interruptor de límite.
- Verá que el motor se detiene de inmediato.
- El resultado en el Monitor Serial se muestra a continuación.
Explicación del código
Puede encontrar la explicación en la línea de comentarios del código de Arduino anterior.
Código ESP8266 - Cambiar la dirección de un motor DC mediante un interruptor de fin de carrera
El código de abajo hace que un motor de CC gire indefinidamente y cambie su dirección cuando se toca un interruptor de límite.
Pasos R\u00e1pidos
- Copia el código anterior y ábrelo con el IDE de Arduino
- Haz clic en el botón Subir en el IDE de Arduino para subir el código al ESP8266
- Si el cableado es correcto, verás que el motor gira en sentido horario.
- Toca el interruptor de límite
- Verás que la dirección del motor DC cambia a antihorario
- Toca de nuevo el interruptor de límite
- Verás que la dirección del motor DC vuelve a girar en sentido horario
- El resultado en el Monitor Serial se muestra a continuación
Código ESP8266 - Cambiar la dirección de un motor de corriente continua mediante dos interruptores de límite
El código a continuación hace que un motor de corriente continua gire indefinidamente y cambie su dirección cuando se active uno de dos interruptores de fin de carrera.
Pasos R\u00e1pidos
- Haz clic en el botón Subir en Arduino IDE para subir código al ESP8266
- Si el cableado es correcto, verás que el motor gira en sentido horario.
- Toca el interruptor de límite 1
- Verás que la dirección del motor de corriente continua cambia a sentido antihorario
- Toca el interruptor de límite 2
- Verás que la dirección del motor de corriente continua cambia a sentido horario
- El resultado en el Monitor Serial se muestra a continuación
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.