ESP8266 - Teclado - Servomotor
Este tutorial te enseña cómo usar el ESP8266 y un teclado numérico para controlar un servomotor. En detalle:
- Si el usuario introduce una contraseña válida en el teclado numérico, el ESP8266 girará el motor servo a 90°.
- Después de un cierto tiempo, el motor servo volverá a 0°.
El código ESP8266 también admite múltiples contraseñas.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del teclado numérico y del servomotor
Si no estás familiarizado con el teclado numérico y el servomotor (incluyendo la asignación de pines, cómo funciona y cómo programarlo), los siguientes tutoriales pueden ayudar:
- ESP8266 - Keypad tutorial
- ESP8266 - Servo Motor tutorial
Diagrama de Cableado
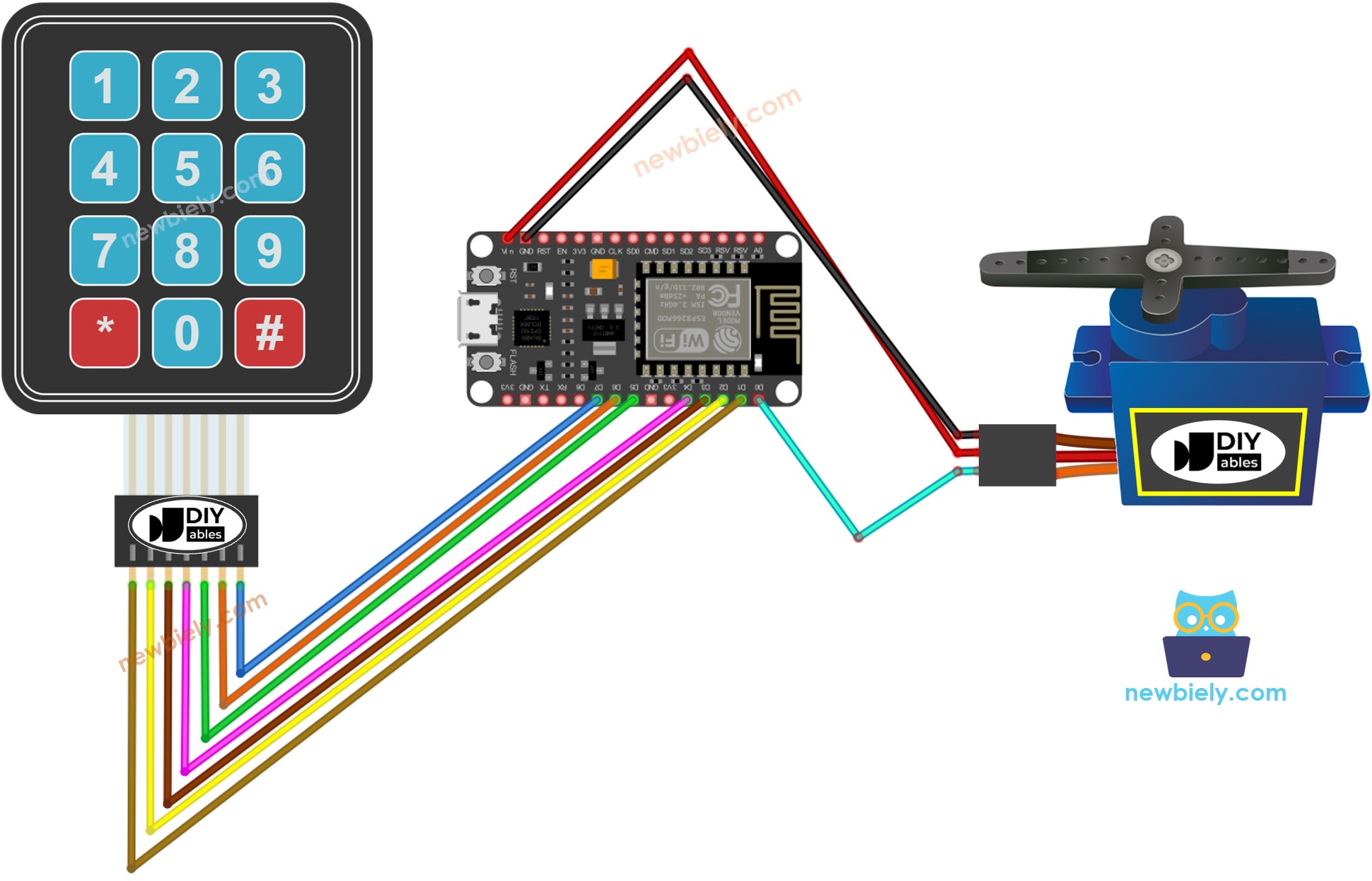
This image is created using Fritzing. Click to enlarge image
Para obtener m\u00e1s informaci\u00f3n, consulte Pines del ESP8266 y c\u00f3mo alimentar ESP8266 y otros componentes.
Por favor, tenga en cuenta que el diagrama de cableado mostrado arriba es adecuado únicamente para un motor servo con par bajo. En caso de que el motor vibre en lugar de girar, se debe utilizar una fuente de alimentación externa para proporcionar más potencia al motor servo. Lo siguiente demuestra el diagrama de cableado con una fuente de alimentación externa para el motor servo.
Imagen a añadir
Por favor, no olvides conectar GND de la fuente de alimentación externa a GND de ESP8266.
Código ESP8266 - gira el servomotor si la contraseña es correcta
Si la contraseña es correcta, el servomotor se colocará en 90° durante 5 segundos. Posteriormente, volverá a 0°.
Pasos R\u00e1pidos
Para empezar con ESP8266 en Arduino IDE, siga estos pasos:
- Consulta el tutorial cómo configurar el entorno para ESP8266 en Arduino IDE si es la primera vez que usas ESP8266.
- Conecta los componentes tal como se muestra en el diagrama.
- Conecta la placa ESP8266 a tu computadora utilizando un cable USB.
- Abre Arduino IDE en tu computadora.
- Elige la placa ESP8266 correcta, como (por ejemplo NodeMCU 1.0 (Módulo ESP-12E)), y su puerto COM correspondiente.
- Conecta un cable USB entre la ESP8266 y el PC.
- Abre Arduino IDE, elige la placa y el puerto correctos.
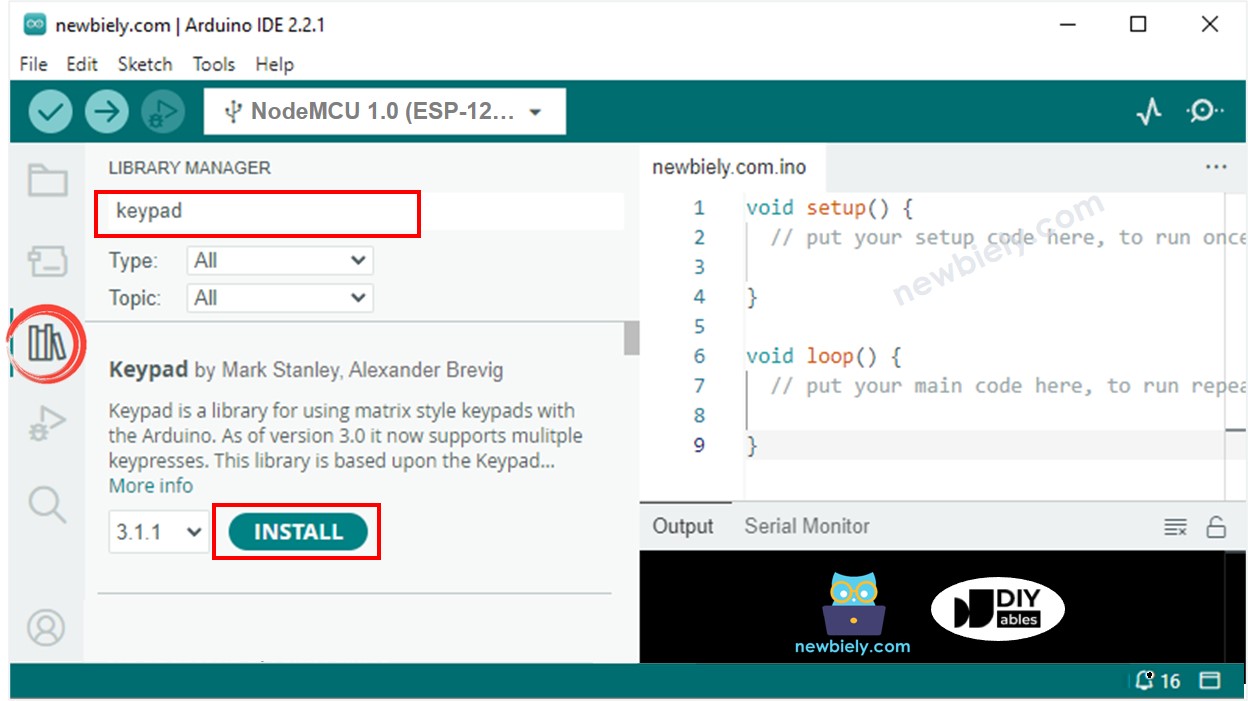
- Haz clic en el icono Bibliotecas en la barra izquierda del Arduino IDE.
- Busca “keypad” y localiza la biblioteca keypad creada por Mark Stanley y Alexander Brevig.
- Pulsa el botón Instalar para instalar la biblioteca keypad.
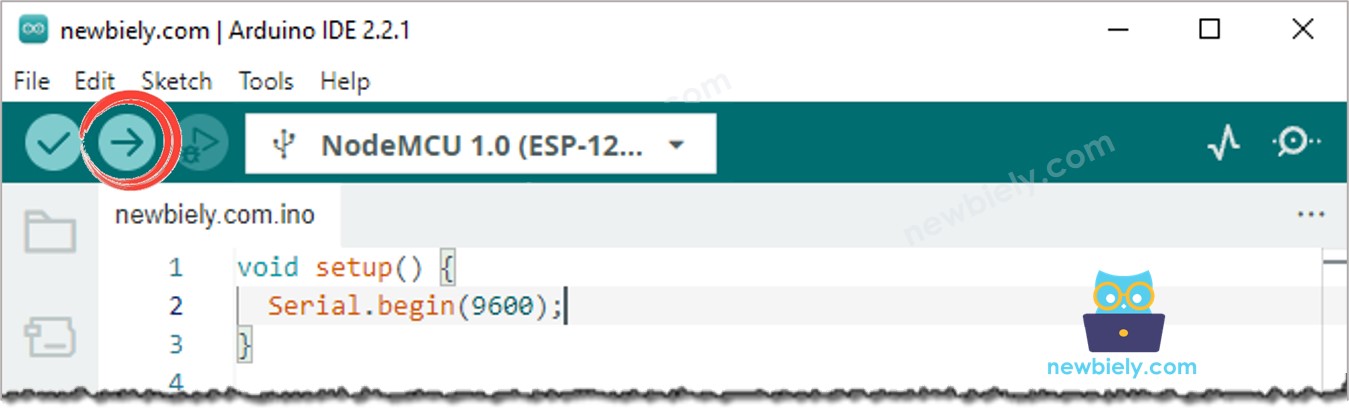
- Copia el código y ábrelo con el IDE de Arduino.
- Haz clic en el botón Subir en el IDE de Arduino para compilar y subir el código al ESP8266.
- Introduce 12345# en el teclado numérico.
- Luego, introduce 5642B#.
- Revisa el Monitor Serial y observa el estado del servomotor.
Explicación del código
Las contraseñas válidas están predefinidas en el código ESP8266. Una cadena, llamada input_password, se utiliza para almacenar la contraseña introducida por los usuarios. El teclado numérico tiene dos teclas (* y #) que se utilizan para fines especiales: borrar la contraseña y finalizar la introducción de la contraseña. Cuando se pulsa una tecla en el teclado:
- Si no es ninguna de las dos teclas especiales, se añadirá al input_password.
- Si se pulsa la tecla *, entonces input_password se borrará, permitiendo al usuario empezar o reiniciar la introducción de la contraseña.
- Si se pulsa la tecla #:
- El ESP8266 verifica si la contraseña es válida comparando input_password con las contraseñas predefinidas. Si coincide con alguna de ellas, el ESP8266 gira el servomotor a 90°.
- Independientemente de si la contraseña es correcta o no, input_password se borrará para la próxima entrada.
- Después de un tiempo de espera, ESP8266 gira el servomotor a 0°.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.