Arduino Nano - Motor
Este tutorial explica cómo usar Arduino Nano y ......... para controlar ........... . En detalle:
- Los tipos de motores que se pueden usar con Arduino Nano
- Las diferencias entre los distintos tipos de motores
- Cómo manejar cada tipo de motor
Tipos de Motores
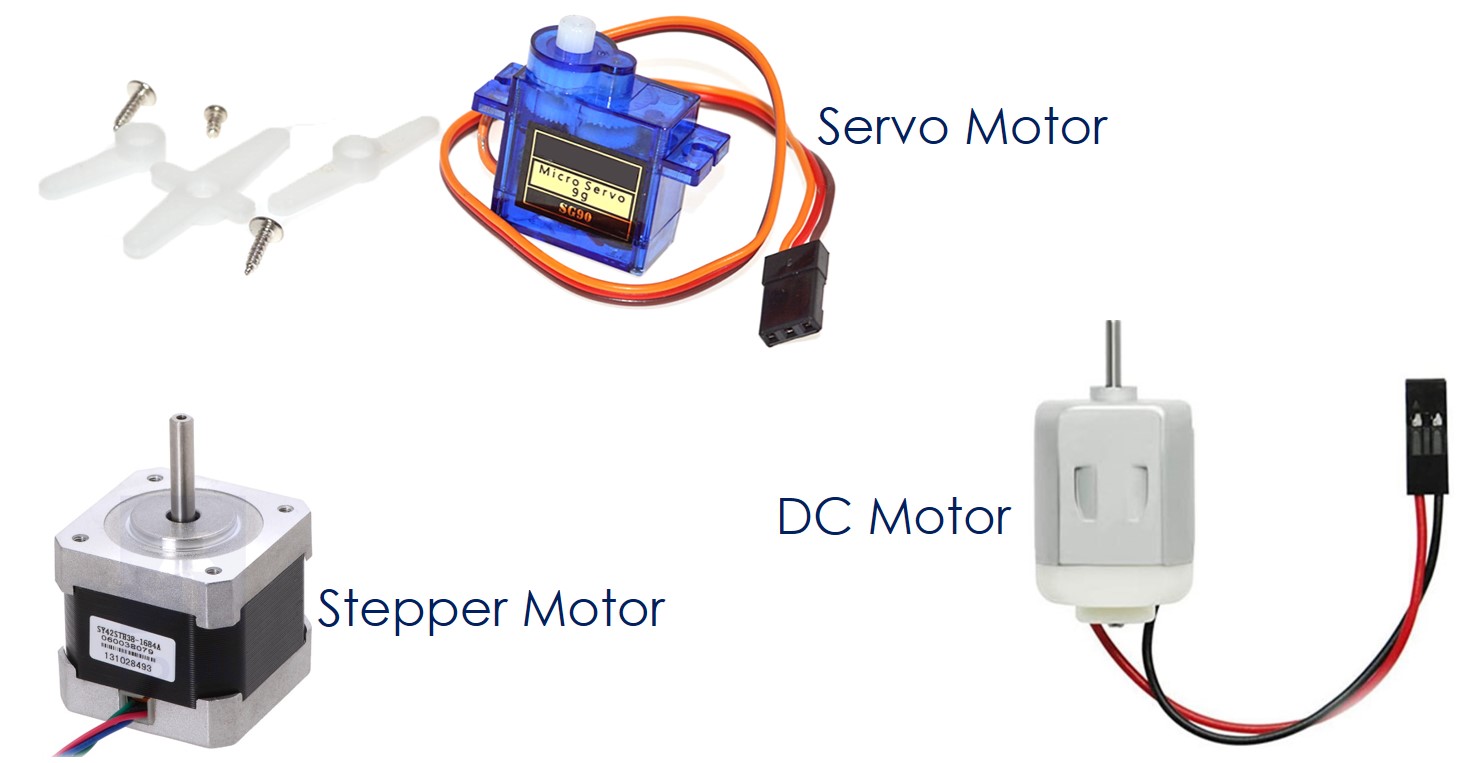
Hay tres tipos de motores que se utilizan comúnmente con Arduino:
- Servomotor
- Motor paso a paso
- Motor de corriente continua
Hay dos variedades principales de servomotores: el servomotor de 180° y el servomotor de 360°. Generalmente, cuando la gente piensa en un servomotor, suele referirse al servomotor de 180°.
Un servomotor de 360° es similar a un motor de corriente continua, pero no requiere un controlador de hardware.
Servomotor de 180°
Características
- El rango de rotación es de 0° a 180°.
- La dirección de la rotación puede ser en sentido horario o antihorario.
- Es posible controlar la rotación a un ángulo específico entre 0° y 180°.
- La velocidad de rotación es ajustable, pero no de forma suave.
- No es necesario ningún controlador de hardware adicional para el control, ya que se puede hacer directamente desde un pin de Arduino Nano.
- Es necesaria una fuente de alimentación adicional.
- Controlar la rotación es fácil, ya que se puede hacer con una señal PWM.
Aplicación
- Cualquier aplicación que requiera únicamente una rotación de un ángulo entre 0° y 180°.
Tutorial de servomotor
Visita esta página para un tutorial sobre Arduino Nano y un servomotor.
Motor paso a paso
Características
- La cantidad de rotación no está restringida.
- La dirección de la rotación puede ser en sentido horario o antihorario.
- La posición de la rotación puede ajustarse con precisión a cualquier ángulo.
- La velocidad de rotación puede controlarse con precisión, así como la aceleración y la desaceleración.
- Se requiere hardware adicional y una fuente de alimentación.
- Controlarlo es complejo, por lo que los principiantes deberían usar una biblioteca.
Aplicación
- Automatización y robótica
- Impresoras, impresoras 3D, CNCs, plotters X-Y
- Máquinas de cócteles
Tutorial de motor paso a paso
- Arduino Nano - Stepper Motor tutorial
Motor de corriente continua
Características
- El número de rotaciones no está limitado.
- La dirección de rotación puede ser en sentido horario o antihorario.
- Es muy difícil rotar a un ángulo preciso.
- Es fácil controlar la velocidad de rotación, pero es difícil establecer un valor de velocidad específico.
- Es necesario un controlador de hardware adicional.
- También se requiere una fuente de alimentación adicional.
- Controlar la rotación es simple, solo use una señal PWM de alta tensión.
※ Nota:
- , lo cual facilita el control.
- Para lograr un posicionamiento preciso de un motor de corriente continua, se requiere hardware adicional, como un codificador, y se debe utilizar un método de control en lazo cerrado, como el control PID. Esto puede ser desafiante para los principiantes.
- Para el control de velocidad, es fácil ajustar la velocidad, como lenta, media, rápida o muy rápida, así como el porcentaje de la velocidad máxima. Sin embargo, para controlar el número de giros por segundo, se necesita un codificador y un método de control en lazo cerrado como el control PID. Esto puede ser difícil para quienes están empezando.
- Ciertos motores de corriente continua en el mercado vienen con un codificador integrado, lo que facilita el proceso de control.
Aplicación
- Anteriormente se utilizaba para controlar algo que requiere rotación constante, sin necesidad de especificar la velocidad. Los ejemplos incluyen ventiladores, bombas, coches RC, taladros, etc.
※ Nota:
y robótica. Existen dos tipos principales de motores de corriente continua: con escobillas y sin escobillas. Los motores de corriente continua con escobillas se utilizan comúnmente en proyectos de bricolaje y robótica.
Tutorial de motor de corriente continua
Consulta nuestro Arduino Nano - DC Motor tutorial para obtener más información. Echa un vistazo a nuestro Arduino Nano - DC Motor tutorial para más detalles!
Guía de selección de motores
Al seleccionar un motor para un proyecto, hay varios factores a considerar, como el peso que debe soportar, la fuente de alimentación y las características de la aplicación:
- Si su proyecto requiere una rotación entre 0° y 180°, entonces debería buscar un servomotor de 180°
- Si su proyecto necesita girar con precisión a cualquier posición, entonces debería encontrar un motor paso a paso
- Si su proyecto necesita girar de forma continua sin una posición específica, entonces debería adquirir un motor de corriente continua o un servomotor de 360°