Arduino Nano - joystick - servomotor
Este tutorial te enseña a usar Arduino Nano y un joystick para controlar dos servomotores o un kit de paneo e inclinación.
Un joystick está equipado con dos potenciómetros que son perpendiculares entre sí (conocidos como el eje X y el eje Y). Estos potenciómetros proporcionan valores analógicos (valor X y valor Y) en los pines VRX y VRY. Usaremos estos valores analógicos para controlar de forma independiente dos servomotores: el valor X para el servomotor n.º 1 y el valor Y para el servomotor n.º 2. Al usar un kit de paneo e inclinación, el movimiento de los dos servomotores genera movimiento tridimensional.
Hay dos casos de uso de la aplicación:
- Caso de uso 1: Los servomotores giran de acuerdo con el movimiento del pulsador del joystick:
- Los ángulos de los servomotores son proporcionales a los valores de X e Y del joystick.
- Cuando se suelta el pulsador del joystick, todos los valores vuelven a los valores centrales y los servomotores vuelven automáticamente a la posición central
- Caso de uso 2: Utilice el joystick para comandar los servomotores (comandos arriba/abajo/izquierda/derecha)
- Cuando se empuja el pulsador del joystick hacia la izquierda, el servomotor nº 1 se mueve en sentido horario
- Cuando se empuja el pulsador del joystick hacia la derecha, el servomotor nº 1 se mueve en sentido antihorario
- Cuando se empuja el pulsador del joystick hacia arriba, el servomotor nº 2 se mueve en sentido horario
- Cuando se empuja el pulsador del joystick hacia abajo, el servomotor nº 2 se mueve en sentido antihorario
- Cuando se suelta el pulsador del joystick, los servomotores no volverán a la posición central
- Si el joystick se presiona (botón pulsador), los servomotores volverán a la posición central
- Conecta el cable USB al Arduino Nano y al PC.
- Inicia el IDE de Arduino, elige la placa y el puerto correctos.
- Copia el código y ábrelo en el IDE de Arduino.
- Haz clic en el botón Subir en el IDE de Arduino para enviar el código al Arduino Nano.
- Abrir el Monitor Serial
- Empuja el joystick en una dirección determinada
- Comprueba la rotación del servomotor
- Comprueba el resultado en el Monitor Serial
- Haz clic en el icono de Bibliotecas en la barra lateral izquierda del IDE de Arduino.
- Busca “ezButton” y localiza la biblioteca de botones de ArduinoGetStarted.com.
- Presiona el botón Instalar para instalar la biblioteca ezButton.
- Copia el código y ábrelo con el IDE de Arduino.
- Haz clic en el botón Subir en el IDE para transferir el código al Arduino Nano.
- Abre el Monitor Serial.
- Mueve el joystick en una dirección determinada.
- Observa la rotación del servomotor.
- Verifica el resultado en el Monitor Serial.
El tutorial proporciona el código para ambos escenarios.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del Joystick y del Servomotor
Si no estás familiarizado con el joystick y el motor servo (incluyendo la asignación de pines, la funcionalidad, la programación, etc.), los siguientes tutoriales pueden ser de ayuda:
Diagrama de Cableado
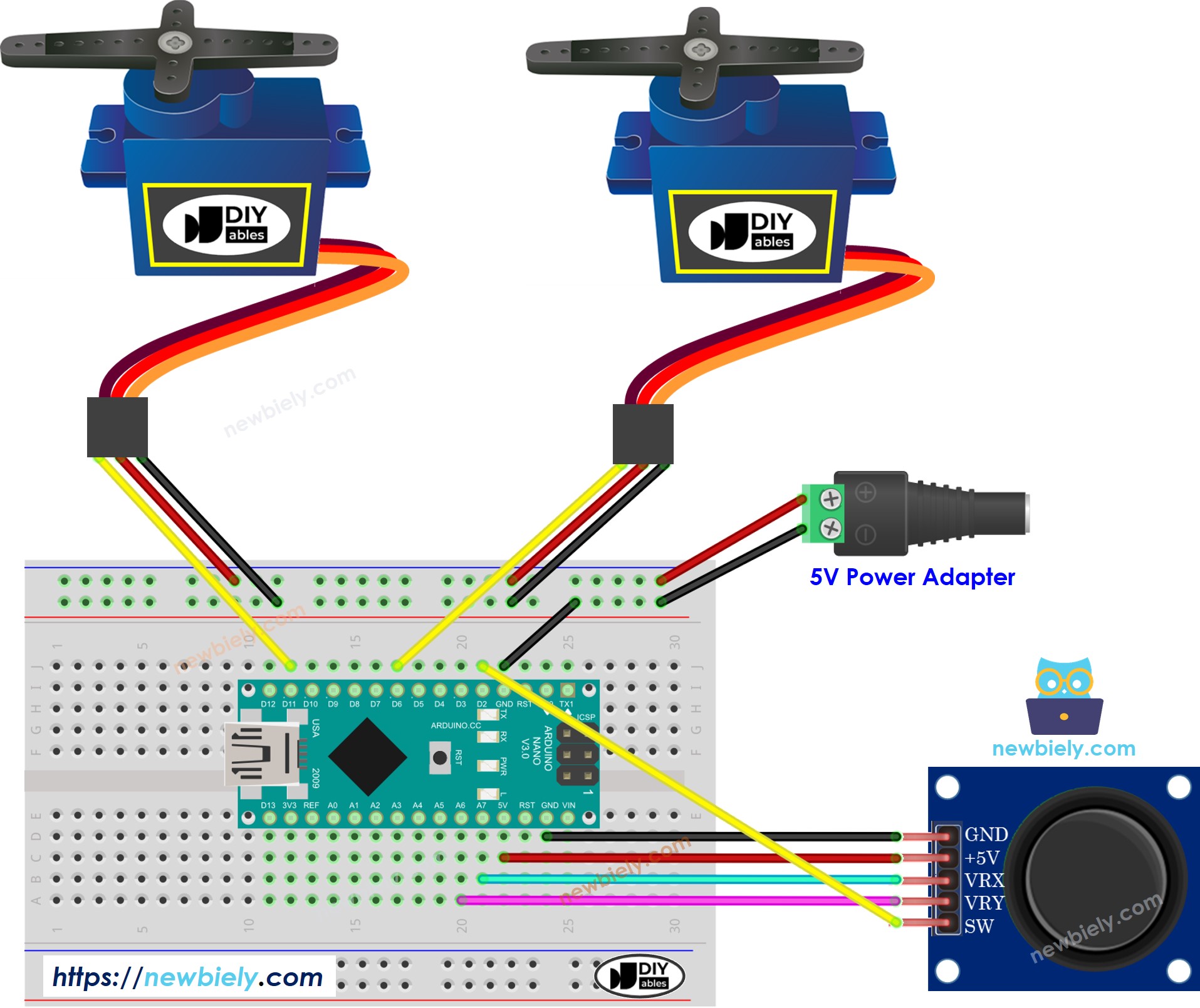
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Nano y otros componentes.
Por favor, no olvides conectar la masa de la fuente externa a la masa del Arduino Nano.
Código de Arduino Nano
Código para Arduino Nano - Los servomotores giran de acuerdo con el movimiento del pulgar del joystick
Pasos R\u00e1pidos

Código de Arduino Nano - Utiliza el joystick para controlar servomotores
Pasos R\u00e1pidos

Explicación del código
Echa un vistazo a la explicación línea por línea contenida en los comentarios del código fuente.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.