Arduino Nano - Botón - Servomotor
En este tutorial, aprenderás a controlar un servomotor con un Arduino Nano y un botón. Cuando se presione el botón, el servomotor girará 90 grados. Si se vuelve a presionar el botón, el servomotor volverá a 0 grados. Esta acción se repetirá continuamente.
Este tutorial tiene dos secciones:
- Operar un servomotor sin anti-rebote en un botón.
- Operar un servomotor con anti-rebote en un botón.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del motor servo y del botón
Si no estás familiarizado con servomotores y botones (incluyendo la disposición de pines, cómo funcionan y cómo programarlos), los siguientes tutoriales pueden ayudar:
Diagrama de Cableado
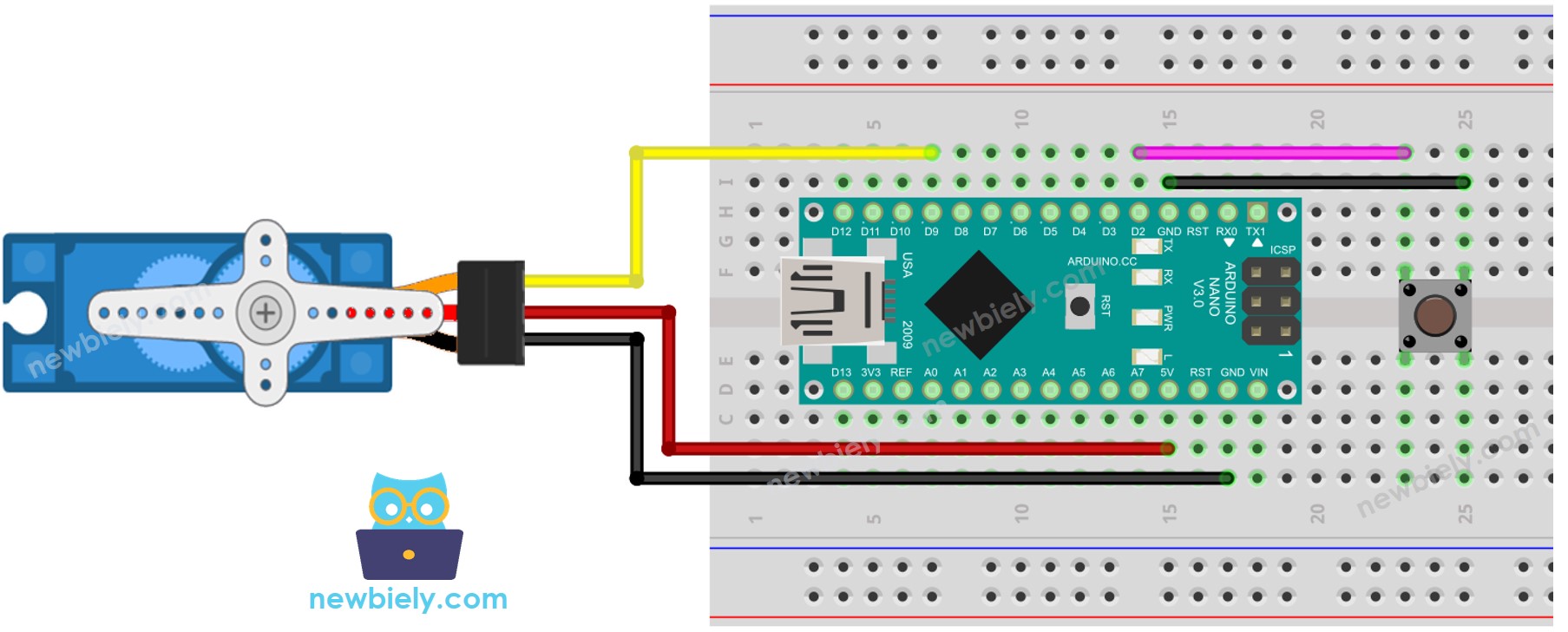
This image is created using Fritzing. Click to enlarge image
Cabe señalar que el esquema de cableado que se muestra arriba solo es adecuado para un motor servo de par bajo. En caso de que el motor vibre en lugar de girar, se debe utilizar una fuente de alimentación externa para hacer funcionar el motor servo. El siguiente diagrama de cableado demuestra cómo conectar el motor servo a una fuente de alimentación externa.
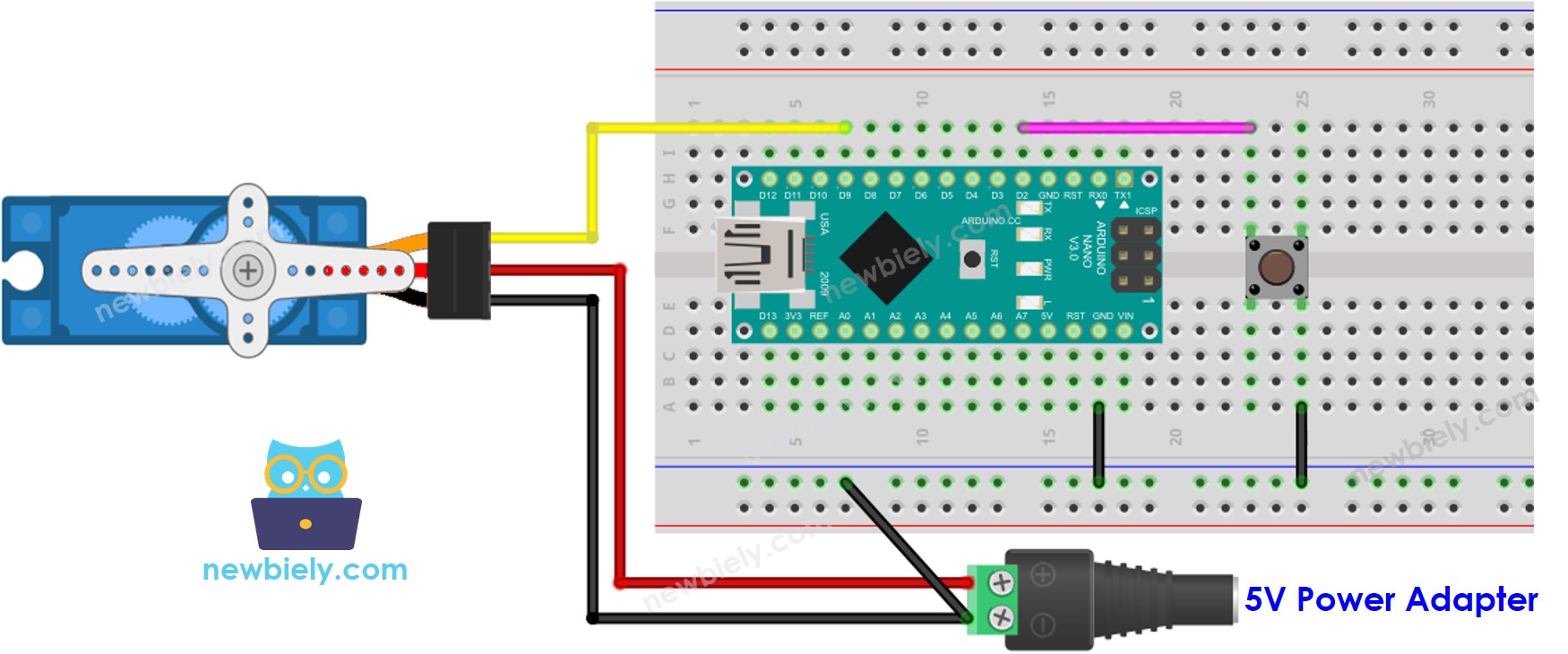
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Nano y otros componentes.
Por favor, no olvides conectar la masa de la fuente de alimentación externa a la masa del Arduino.
Código de Arduino Nano: el botón controla el servomotor sin rebote
Pasos R\u00e1pidos
- Conecta un cable USB a tu Arduino Nano y a tu PC.
- Inicia el IDE de Arduino, selecciona la placa y el puerto correctos.
- Pega el código en el IDE y ábrelo.
- Haz clic en el botón Cargar en el IDE para enviar el código al Arduino Nano.
- Presiona el botón varias veces.
- Observa el movimiento del servomotor.
※ Nota:
En la práctica, el código mencionado anteriormente no siempre funciona correctamente. Para asegurar que funcione correctamente, necesitamos antirrebote del botón. El antirrebote del botón puede ser difícil para quienes son nuevos en el tema. Afortunadamente, con la ayuda de la biblioteca ezButton, esta tarea puede hacerse mucho más simple.
Código de Arduino Nano - Botón que controla el servomotor con rebote
¿Por qué es necesario el antirrebote? Consulta el Arduino Nano - Tutorial de antirrebote del botón para obtener más información.
Pasos R\u00e1pidos
- Instala la biblioteca ezButton. Consulta Cómo hacerlo para obtener instrucciones.
- Abre el código en el IDE de Arduino.
- Haz clic en el botón Subir en el IDE de Arduino para subir el código al Arduino Nano.
- Presiona el botón varias veces.
- Observa los cambios en el servomotor.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.