Arduino Nano - Coche
Este tutorial te enseña cómo construir un coche controlado por infrarrojos usando Arduino Nano y un mando a distancia IR.

Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca de Robot Car
En el mundo de Arduino Nano, el coche robot se conoce comúnmente como coche RC, coche de control remoto, coche inteligente o coche de bricolaje. Esta ingeniosa creación puede ser controlada a distancia ya sea mediante un control remoto IR o una aplicación para smartphone a través de Bluetooth/WiFi. Puede hacer giros pronunciados a la izquierda o a la derecha y avanzar o retroceder con facilidad.
Un vehículo de tracción en dos ruedas (2WD) para Arduino Nano es un pequeño coche robótico que puedes ensamblar y hacer funcionar con una placa Arduino Nano. Por lo general, consta de las siguientes piezas esenciales:
- Chasis: Este es como el cuerpo del coche, donde se conectan todos los demás componentes.
- Ruedas: Estas son las dos ruedas que hacen que el coche se mueva. Están conectadas a dos motores DC.
- Motores: Se utilizan dos motores de corriente continua para impulsar las dos ruedas.
- Controlador de motor: La placa controladora de motores es un componente crucial que conecta el Arduino Nano con los motores. Recibe señales del Arduino Nano y proporciona energía y control a los motores.
- Placa Arduino Nano: Este es el cerebro del coche. Lee entradas de sensores y comandos del usuario y controla los motores en consecuencia.
- Fuente de alimentación: El coche de tracción en dos ruedas necesita una fuente de energía, normalmente baterías y un soporte para baterías, para suministrar energía a los motores y a la placa Arduino Nano.
- Receptor inalámbrico: Este es un módulo infrarrojo, Bluetooth o WiFi que permite la comunicación inalámbrica con un control remoto o teléfono inteligente.
- Componentes opcionales: Dependiendo de cuán avanzado quieras que sea tu proyecto, puedes agregar varias piezas opcionales como sensores (por ejemplo, sensores ultrasónicos para evitar obstáculos o sensores de seguimiento de líneas) y más.
En este tutorial, para simplificarlo, usaremos:
- Kit de coche 2WD (incluye chasis, ruedas, motores, portabaterías)
- Controlador de motor L298N
- Kit infrarrojo (incluye controlador IR y receptor IR)
Revise la lista de hardware en la parte superior de esta página.
Cómo funciona
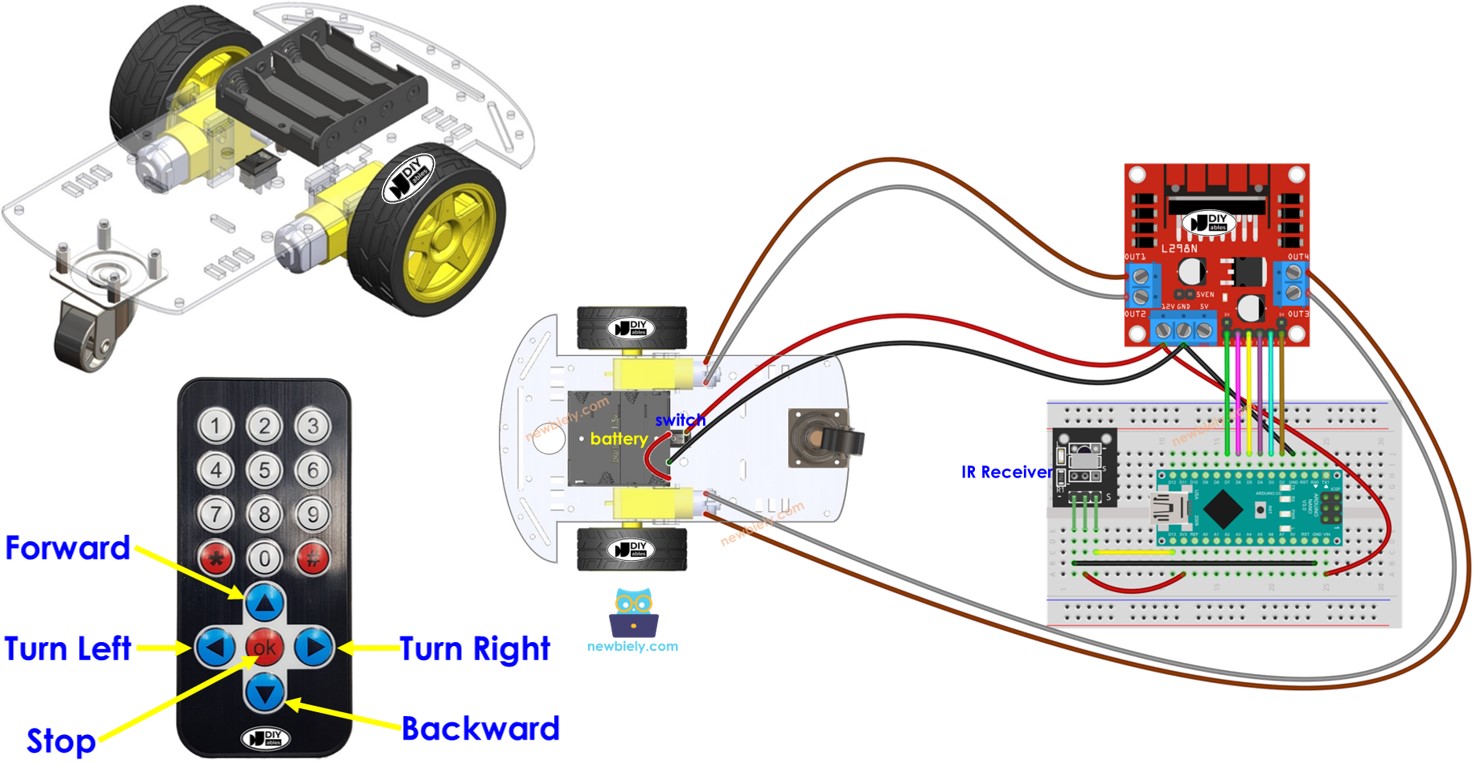
- Arduino Nano se conecta a los motores DC del coche robot mediante el módulo controlador de motor L298N.
- Arduino Nano se conecta a un receptor IR.
- La batería alimenta al Arduino Nano, a los motores DC, al controlador de motor y al receptor IR.
- Los usuarios pulsan las teclas ARRIBA/ABAJO/IZQUIERDA/DERECHA/OK en el control remoto IR.
- Arduino Nano recibe los comandos ARRIBA/ABAJO/IZQUIERDA/DERECHA/OK a través del receptor IR.
- Arduino Nano controla el coche para avanzar/retroceder/izquierda/derecha/DETENER moviendo el motor DC a través del controlador de motor.
Diagrama de Cableado
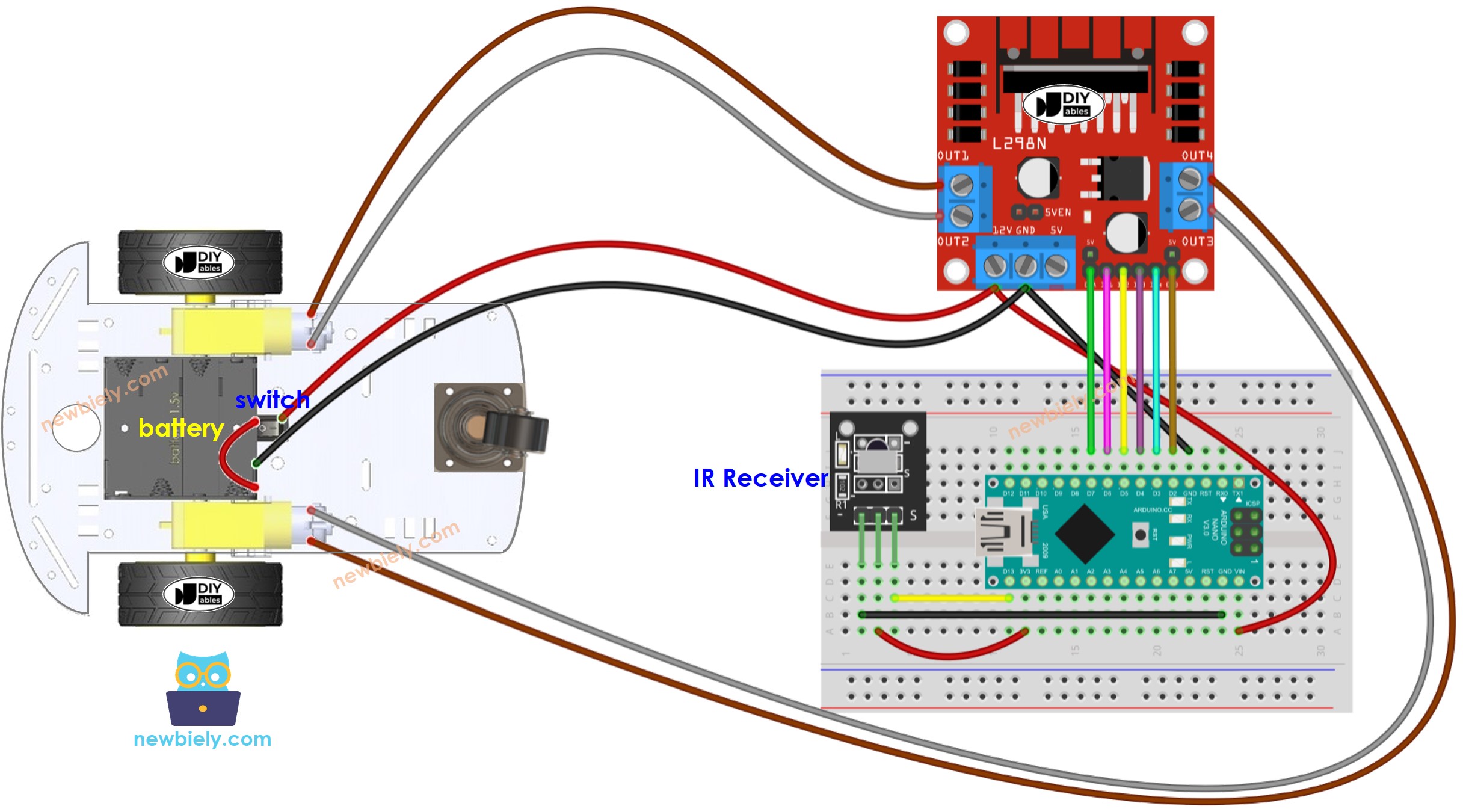
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Nano y otros componentes.
Normalmente, requerimos dos fuentes de energía:
- Uno para el motor (indirectamente a través del módulo L298N).
- Otro para la placa Arduino Nano, el módulo L298N y el receptor IR.
Sin embargo, hay una forma de simplificar esto y usar una única fuente de energía para todo. Puedes lograrlo usando cuatro baterías de 1,5 V (un total de 6 V). Así es como:
- Conecta las baterías al módulo L298N siguiendo el diagrama anterior.
- Retira los tres jumpers del módulo L298N.
Código de Arduino Nano
Pasos R\u00e1pidos
- Instala la biblioteca DIYables_IRcontroller en el IDE de Arduino siguiendo esta instrucción
- Haz el cableado según el diagrama mostrado arriba.
- Desconecta el cable del pin Vin del Arduino Nano porque vamos a alimentar el Arduino Nano mediante un cable USB al subir el código.
- Da la vuelta al coche para que las ruedas queden en la parte superior.
- Conecta el Arduino Nano a tu ordenador usando el cable USB.
- Copia el código proporcionado y ábrelo en el IDE de Arduino.
- Haz clic en el Subir botón en el IDE de Arduino para transferir el código al Arduino Nano.
- Utiliza el control remoto IR para hacer que el coche avance, retroceda, gire a la izquierda, gire a la derecha o se detenga.
- Verifica si las ruedas se mueven correctamente de acuerdo con tus comandos.
- Si las ruedas se mueven en la dirección equivocada, intercambia los cables del motor DC en el módulo L298N.
- También puedes ver los resultados en el Monitor Serial en el IDE de Arduino.
- Si todo funciona correctamente, desconecta el cable USB del Arduino Nano, y vuelve a conectar el cable al pin Vin para alimentar al Arduino Nano con la batería.
- Coloca de nuevo el coche en su posición normal con las ruedas en el suelo.
- ¡Diviértete controlando el coche!
Explicación del código
Puede encontrar la explicación en la línea de comentarios del código de Arduino anterior.
Puedes aprender más sobre el código consultando los siguientes tutoriales:
- Arduino Nano - DC motor tutorial
Puedes ampliar este proyecto mediante:
- Añadir sensores de evitación de obstáculos para detener el coche inmediatamente si se detecta un obstáculo.
- Añadir una función para controlar la velocidad del coche (ver Arduino Nano - DC motor tutorial). El código proporcionado controla el coche a velocidad máxima.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.