Arduino UNO R4 - Sensor ultrasónico - servomotor
En este tutorial, aprenderemos a usar un sensor ultrasónico para controlar un servomotor con un Arduino Uno R4 basado en la distancia al objeto. Cuando un objeto está cerca, el servomotor gira a 90 grados. Cuando el objeto se aleja, el servomotor regresa a 0 grados. Este proyecto es ideal para que los principiantes exploren la detección de distancia ultrasónica y el control de un servomotor con Arduino Uno R4.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca de servomotor y sensor ultrasónico
Si no está familiarizado con los motores servo y los sensores ultrasónicos (su disposición de pines, funcionamiento e instrucciones de programación), consulte los tutoriales que se muestran a continuación:
Diagrama de Cableado
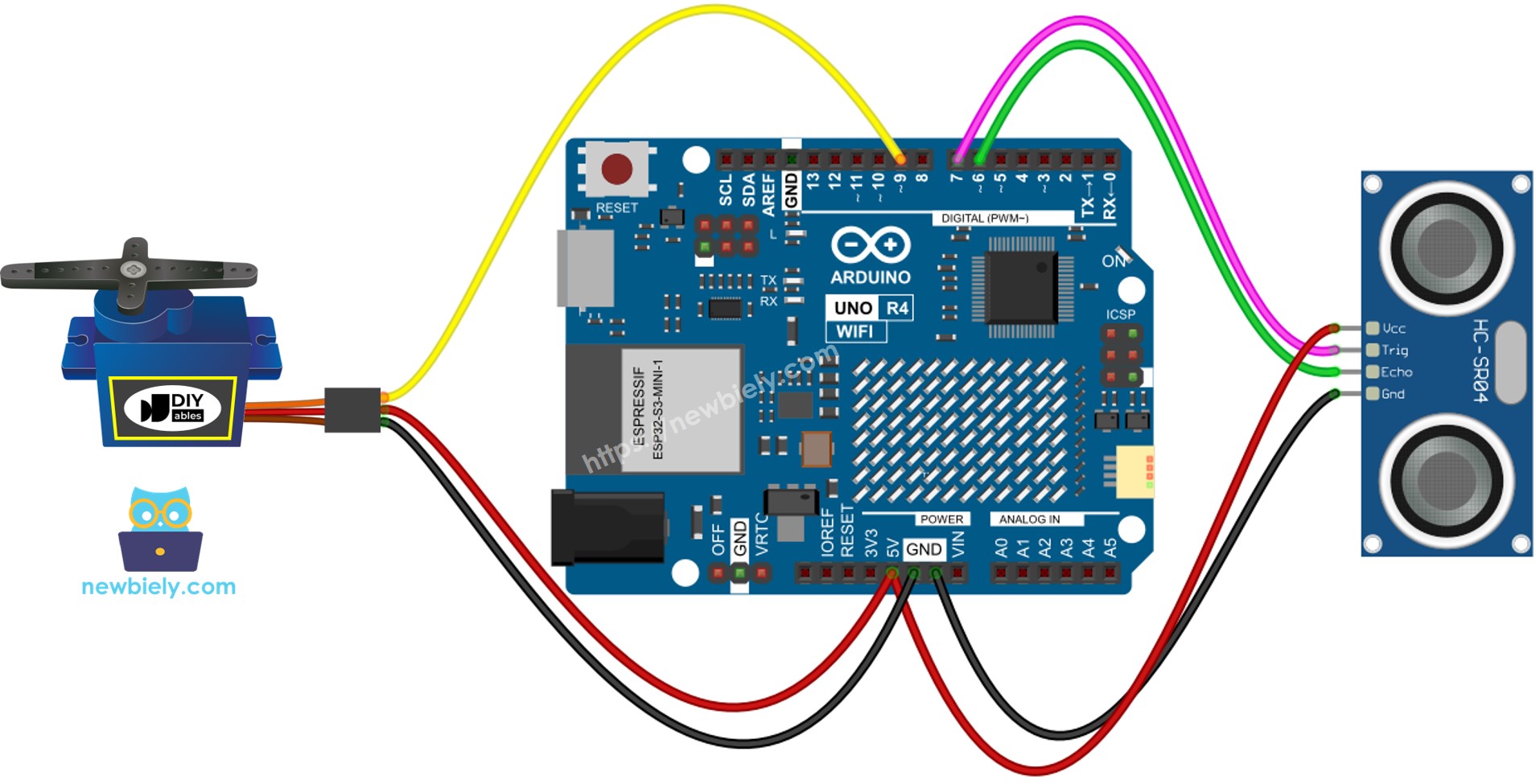
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Código Arduino UNO R4 - Sensor ultrasónico controla servomotor
Pasos R\u00e1pidos
Sigue estas instrucciones paso a paso:
- Si es la primera vez que usas Arduino Uno R4 WiFi/Minima, consulta el tutorial sobre configurar el entorno para Arduino Uno R4 WiFi/Minima en el IDE de Arduino.
- Conecta el servomotor y el sensor ultrasónico al Arduino Uno R4 según el diagrama proporcionado.
- Conecta la placa Arduino Uno R4 a tu computadora usando un cable USB.
- Abre el IDE de Arduino en tu computadora.
- Selecciona la placa adecuada Arduino Uno R4 (p. ej., Arduino Uno R4 WiFi) y el puerto COM.
- Copia y pega el código anterior en el IDE de Arduino.
- Presiona el botón Subir en el IDE de Arduino para transferir el código al Arduino UNO R4.
- Mueve tu mano frente al sensor.
- Observa cómo se mueve el servomotor en respuesta.
※ Nota:
El código proporcionado está destinado a aprender. El sensor ultrasónico se ve fácilmente afectado por el ruido. Para usar el sensor ultrasónico de manera efectiva, debes eliminar el ruido. Para obtener orientación sobre cómo hacer esto, visite cómo filtrar el ruido para el sensor ultrasónico.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.