Arduino UNO R4 - actuador
Descubre cómo usar el Arduino Uno R4 para controlar un actuador lineal en este sencillo tutorial. Perfecto para principiantes, esta guía te enseña cómo usar un controlador L298N para proyectos de bricolaje divertidos. Esto es lo que aprenderás:
- Qué es un actuador lineal y cómo se mueve
- Pasos simples para hacer que el actuador se extienda o retraiga
- Cableado sencillo con el driver L298N
- Código de Arduino claro para controlar el actuador
- Cómo cambiar la velocidad del actuador para moverlo más rápido o más lento
Este tutorial trata sobre actuadores lineales sin retroalimentación. Si quieres aprender sobre actuadores lineales con retroalimentación, visita nuestra guía Arduino UNO R4 - Actuador con Retroalimentación. ¡Sigue este sencillo proyecto de Arduino para construir tu propio sistema de automatización inteligente!
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del actuador lineal
Disposición de pines del actuador lineal
Un actuador lineal viene con dos cables.
- Cable positivo: suele ser rojo
- Cable negativo: suele ser negro

Cómo funciona
Al comprar un actuador lineal, es importante entender con qué voltaje opera. Por ejemplo, considere un actuador lineal que funciona con 12 voltios.
Cuando conectas el actuador lineal de 12 V a una fuente de alimentación de 12 V:
- Conecte 12V al cable positivo y GND al cable negativo: el actuador lineal se extiende por completo a alta velocidad hasta que se detiene en su límite.
- Conecte 12V al cable negativo y GND al cable positivo: el actuador lineal se retrae por completo a alta velocidad hasta que se detiene en su límite.
Cuando cortas la energía al actuador conectando tanto el cable positivo como el negativo a tierra, el actuador dejará de moverse ni hacia adentro ni hacia afuera.
※ Nota:
Para los motores de corriente continua (DC), servomotores y motores paso a paso sin engranajes, no pueden mantener su posición cuando se corta la energía y llevan una carga. Sin embargo, un actuador puede mantener su posición incluso sin energía cuando lleva una carga.
Si usamos menos de 12 V para los actuadores lineales, siguen funcionando pero no a su velocidad más rápida. Esto demuestra que cambiar la tensión de la fuente de alimentación puede ajustar la velocidad del actuador lineal. Sin embargo, controlar la tensión con precisión es difícil, por lo que este método no se usa comúnmente. En su lugar, la tensión se mantiene constante y la velocidad del actuador lineal se controla mediante una señal PWM. Cuando el ciclo de trabajo del PWM es mayor, el actuador lineal se mueve más rápido.

Cómo controlar un actuador lineal con Arduino Uno R4
Para controlar un actuador lineal, normalmente queremos:
- Haz que se extienda (se mueva hacia afuera) a toda velocidad
- Haz que se retraiga (vuelva a entrar) a toda velocidad
- (Opcional) Controla qué tan rápido se mueve hacia adentro o hacia afuera
El Arduino puede enviar señales de control, pero estas señales son demasiado débiles (baja tensión y corriente) para mover el actuador directamente. Por eso necesitamos un driver entre el Arduino y el actuador.
El conductor realiza dos funciones principales:
- Aumenta (amplifica) la señal del Arduino para que pueda alimentar al actuador.
- Cambia la dirección de la alimentación (cambiando la polaridad) según otra señal del Arduino: esto controla si el actuador se extiende o se retrae.
※ Nota:
- Puedes usar esta guía para cualquier actuador lineal. Usamos un actuador lineal de 12 V como ejemplo.
- Cuando se utiliza un actuador lineal de 5 V con un Arduino UNO R4, aunque ambos usan 5 V, es necesario añadir un controlador. Esto se debe a que el Arduino UNO R4 no puede suministrar suficiente corriente para el actuador.
Esta guía utiliza el controlador L298N, pero hay varios otros chips y módulos, como el L293D, que también pueden controlar actuadores lineales.
Acerca del controlador L298N
El controlador L298N puede controlar dispositivos como actuadores lineales, motores de corriente continua y motores paso a paso. En este tutorial, mostraremos cómo usarlo para controlar un actuador lineal.
Pinout del controlador L298N
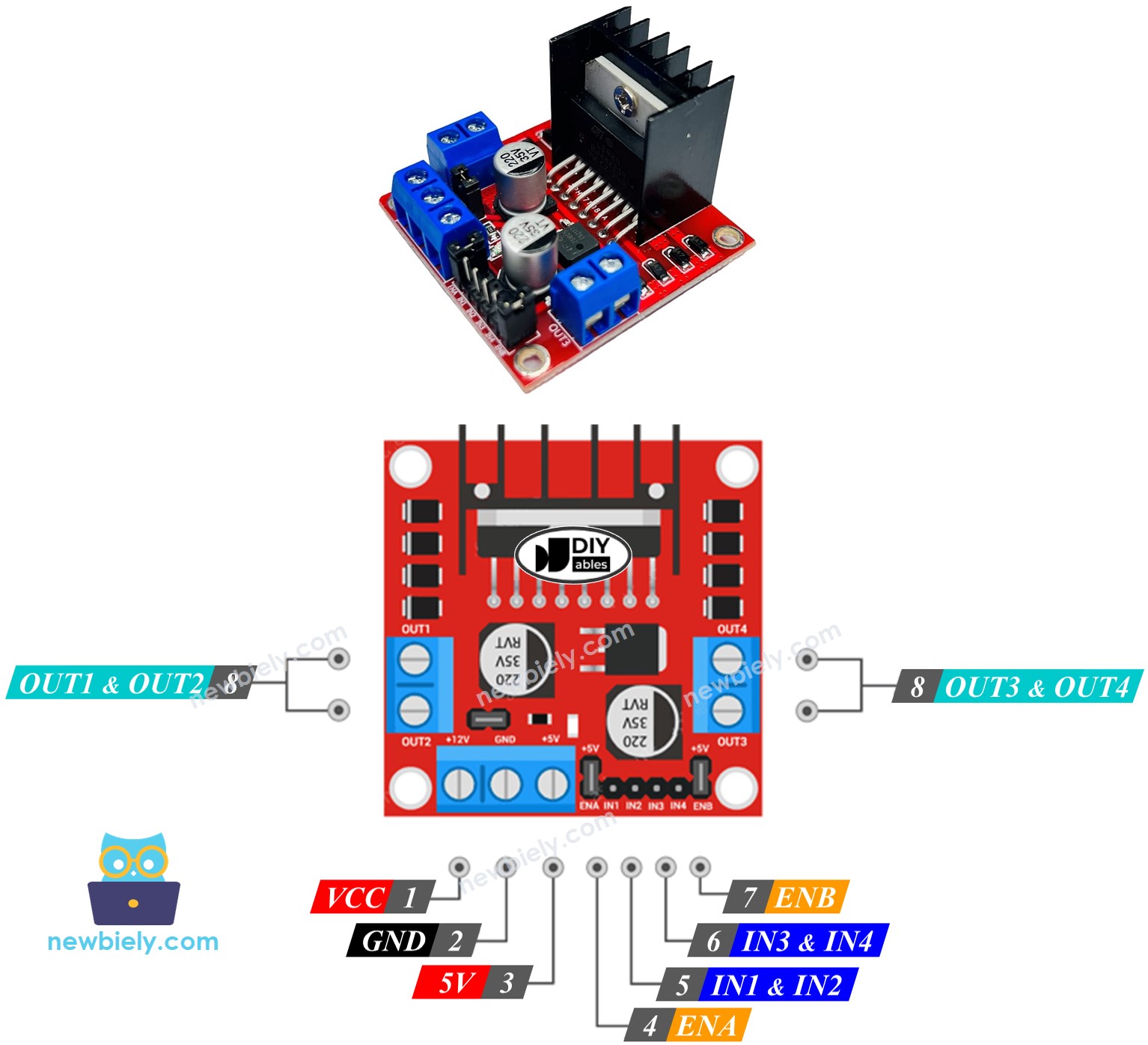
El controlador L298N cuenta con dos canales separados, conocidos como el canal A y el canal B. Esta configuración permite al controlador L298N gestionar dos actuadores lineales diferentes de forma independiente y simultánea. Suponga que el actuador lineal A está vinculado al canal A y el actuador lineal B al canal B. El controlador L298N consta de 13 pines.
Los pines comunes para ambos canales:
- Pin VCC: proporciona energía al actuador lineal. Acepta un rango de 5 a 35 V.
- Pin GND: sirve como tierra común y debe conectarse a GND (0 V).
- Pin de 5 V: alimenta el módulo L298N. Puedes usar 5 V de un Arduino UNO R4 para esto.
Mensajes fijados del Canal A:
- ENA pins: ayudan a gestionar la velocidad a la que se mueve el actuador lineal A. Si desconectas el jumper y conectas este pin a una entrada PWM, puedes ajustar la velocidad a la que se extiende o retrae.
- IN1 & IN2 pins: determinan la dirección en la que se mueve el actuador lineal. Si un pin está en ALTO y el otro en BAJO, el actuador se extenderá o retraerá. Si ambos están en ALTO o ambos en BAJO, el actuador dejará de moverse.
- OUT1 & OUT2 pins: están conectados al actuador lineal A.
Pines del Canal B:
- Pines ENB: Estos pines ajustan la velocidad del actuador lineal B. Desconecte el puente y utilice una entrada PWM en este pin para controlar qué tan rápido se extiende o retrae el actuador lineal B.
- Pines IN3 e IN4: Estos pines determinan la dirección del movimiento de un actuador lineal. Si un pin está en alto y el otro está en bajo, el actuador lineal se extenderá o retraerá. Si ambos pines están en alto o en bajo, el actuador lineal se detendrá.
- Pines OUT3 y OUT4: Estos pines están conectados a un actuador lineal.
El controlador L298N tiene dos tipos de alimentación de entrada:
- Uno para el actuador lineal (pines VCC y GND): de 5 a 35 V.
- Uno para el funcionamiento interno del módulo L298N (pines 5V y GND): de 5 a 7 V.
El controlador L298N viene con tres puentes para usos especiales o diferentes. Para simplificar, por favor retire todos los puentes del controlador L298N.
Podemos gestionar dos actuadores lineales de forma independiente y simultánea utilizando un Arduino UNO R4 y un controlador L298N. Para operar cada actuador lineal, solo necesitamos tres pines del Arduino UNO R4.
※ Nota:
Esta parte de la guía muestra cómo usar el canal A para controlar un actuador lineal. Controlar otro actuador lineal funciona de manera similar.
Cómo controlar un actuador lineal
Aprenderemos a usar el controlador L298N para controlar un actuador lineal.
Diagrama de cableado
Antes de empezar a cablear, retire los tres jumpers del módulo L298N.
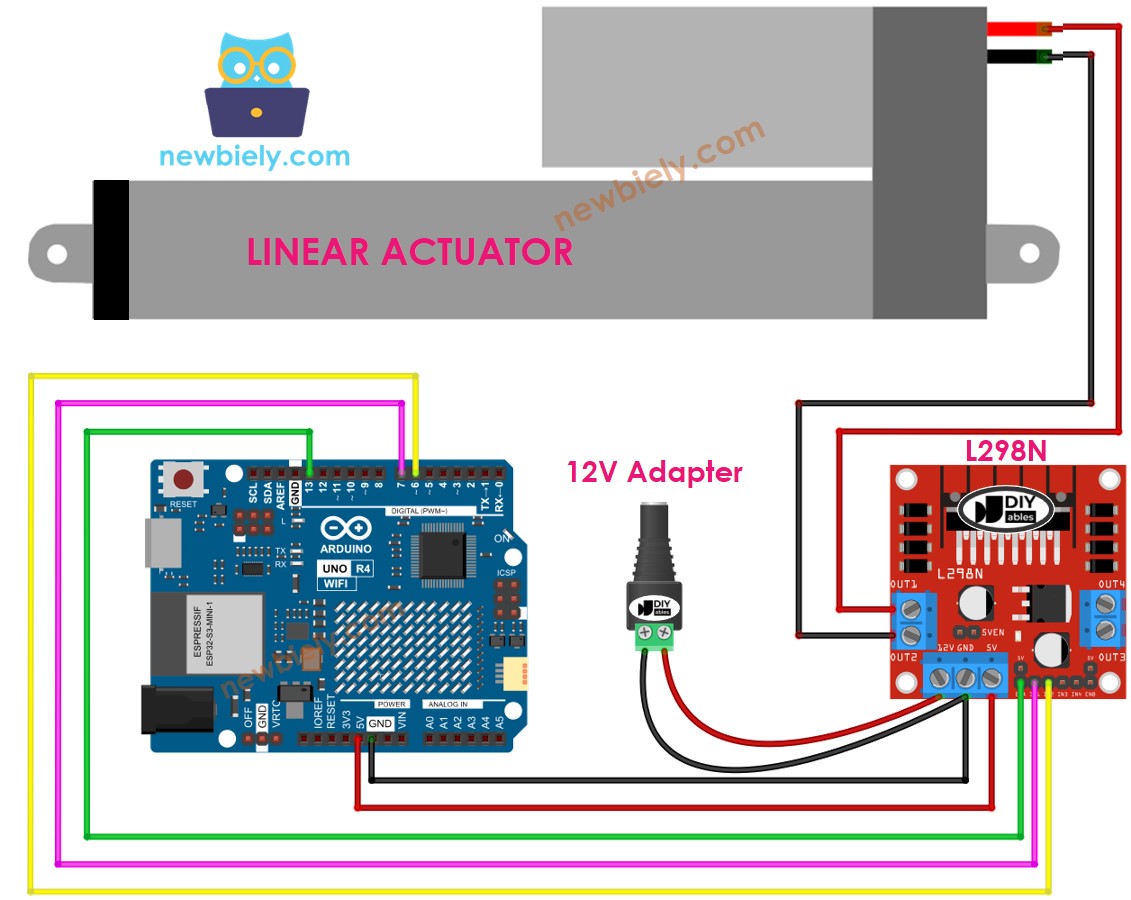
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Cómo hacer que un actuador lineal se expanda y se retraiga
Puedes controlar la dirección de un actuador lineal configurando los pines IN1 e IN2 en ALTO o BAJO. La tabla a continuación muestra cómo hacerlo para ambos canales.
| IN1 pin | IN2 pin | Direction |
|---|---|---|
| LOW | LOW | Linear Actuator A stops |
| HIGH | HIGH | Linear Actuator A stops |
| HIGH | LOW | Linear Actuator A extends |
| LOW | HIGH | Linear Actuator A retracts |
- Alarga el actuador lineal A
- El actuador lineal A se retrae.
※ Nota:
Si los pines OUT1 y OUT2 están conectados de forma incorrecta al actuador lineal, la dirección se invertirá. Para solucionarlo, basta con intercambiar las posiciones de los pines OUT1 y OUT2 o cambiar las señales de control en los pines IN1 y IN2 en el programa.
Cómo evitar que el actuador lineal se extienda o se retraiga
El actuador lineal deja de moverse automáticamente cuando alcanza su punto máximo o mínimo. También podemos configurarlo para que deje de moverse antes de alcanzar estos puntos.
Hay dos métodos para detener un actuador lineal.
- Establece la velocidad a cero
- Configura los pines IN1 e IN2 al mismo nivel (BAJO o ALTO).
- Por favor, revise la gramática y la puntuación antes de publicar este documento.
Cómo controlar la velocidad del actuador lineal mediante el controlador L298N
Para ajustar fácilmente la velocidad del actuador lineal, use una señal PWM en el pin ENA en lugar de configurarlo en HIGH. Así es como puede hacerlo:
- Conecta un pin del Arduino UNO R4 al pin ENA del módulo L298N.
- Usa la función analogWrite() para enviar una señal PWM al pin ENA. El controlador L298N aumentará esta señal para controlar el actuador lineal.
La velocidad puede ser cualquier valor entre 0 y 255. A la velocidad 0, el actuador lineal se detiene. A la velocidad 255, se mueve a su velocidad más rápida.
Código de ejemplo de Arduino UNO R4
Este código realiza las siguientes tareas:
- Mueva el actuador hacia afuera lo más rápido posible
- Detenga el actuador
- Mueva el actuador de vuelta hacia adentro lo más rápido posible
- Detenga el actuador
Pasos R\u00e1pidos
Sigue estas instrucciones paso a paso:
- Si es la primera vez que usas Arduino Uno R4 WiFi/Minima, consulta el tutorial sobre configurar el entorno para Arduino Uno R4 WiFi/Minima en el IDE de Arduino.
- Conecta los componentes de acuerdo con el diagrama proporcionado.
- Conecta la placa Arduino Uno R4 a tu ordenador con un cable USB.
- Abre el IDE de Arduino en tu ordenador.
- Selecciona la placa adecuada Arduino Uno R4 (p. ej., Arduino Uno R4 WiFi) y el puerto COM.
- Quita los tres jumpers del módulo L298N.
- Pega el código en el IDE de Arduino.
- Presiona el botón Upload en el IDE de Arduino para transferir el código a Arduino UNO R4.
- Observe lo siguiente:
- El actuador lineal se extiende y se detiene al alcanzar su límite.
- El actuador lineal mantiene su posición durante un periodo de tiempo.
- El actuador lineal se retrae y se detiene al alcanzar su límite.
- El actuador lineal mantiene su posición durante un periodo de tiempo.
- Esta secuencia se repite continuamente.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.
Resumen
En este tutorial de Arduino UNO R4, aprendiste a controlar un actuador lineal con un controlador L298N para la automatización casera. Esta guía fácil te mostró cómo hacer que el actuador se mueva hacia adentro y hacia afuera, conectar el controlador L298N y cambiar su velocidad mediante la programación en Arduino. Enfocado en actuadores lineales sin retroalimentación, este sencillo proyecto de Arduino te ayuda a construir sistemas de automatización inteligentes. ¡Ahora puedes usar estas habilidades para crear tus propios proyectos de control de movimiento con Arduino UNO R4!