Arduino UNO R4 - Actuador con retroalimentación
Este tutorial de Arduino UNO R4 muestra cómo usar un *actuador lineal de retroalimentación* en tus proyectos de bricolaje.
En la lección anterior, usamos un actuador lineal sin retroalimentación. Ese tipo solo se desplaza hacia adentro o hacia afuera, pero no nos indica su posición.
Ahora, aprenderemos sobre un actuador lineal con retroalimentación. Puede decirnos en qué posición se encuentra mientras se mueve, para que podamos controlar su posición exacta.
En esta guía simple, aprenderás:
- Cómo funciona un actuador lineal con retroalimentación – Qué es y qué hace
- Cómo conocer su posición – Obtén su ubicación en milímetros
- Cómo moverlo al lugar correcto – Controlarlo para que se detenga exactamente donde quieras
Este sencillo proyecto de Arduino es adecuado para principiantes. Sigue esta guía fácil para aprender programación de Arduino y crear un sistema móvil inteligente.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del Actuador Lineal de Retroalimentación
Un actuador lineal con retroalimentación es un tipo de actuador lineal que incluye una señal de retroalimentación para monitorear y controlar su posición. Esta retroalimentación proviene de un potenciómetro que proporciona una salida de voltaje correspondiente a la posición del actuador.
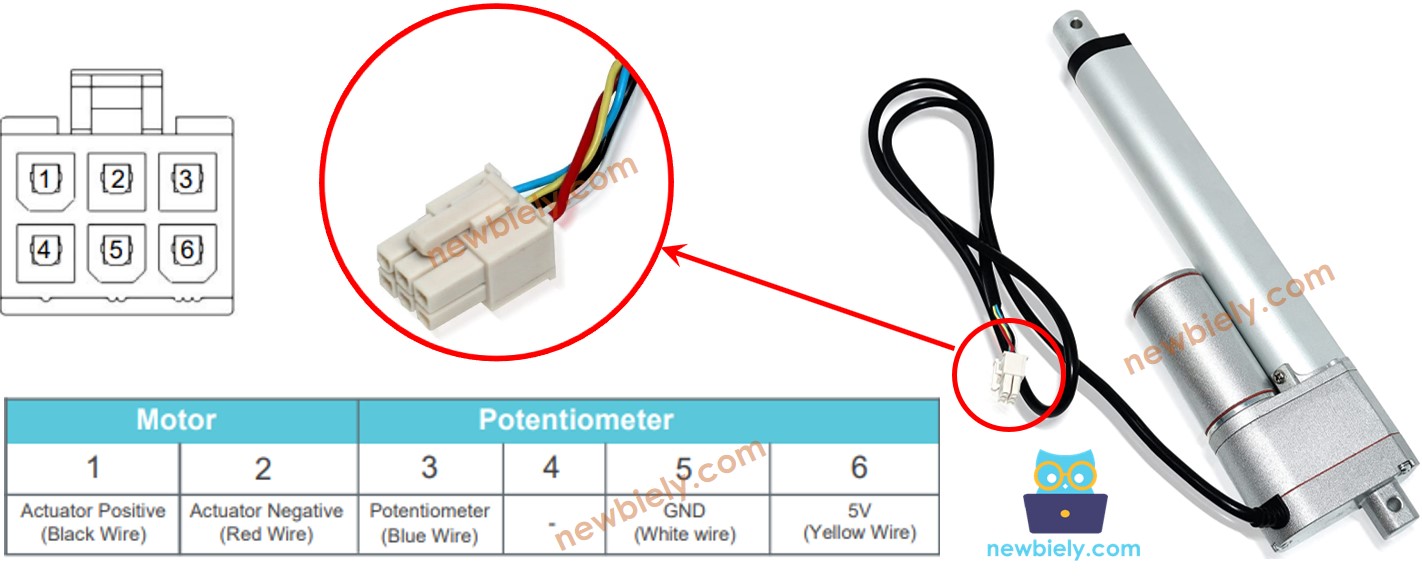
Esquema de pines del actuador lineal de retroalimentación
Un actuador lineal con retroalimentación tiene cinco cables:
- Cable positivo del actuador: Este cable controla el actuador lineal utilizando alta tensión (12 V, 24 V, 48 V).
- Cable de 5 V: Este cable se conecta al potenciómetro de retroalimentación. Conéctelo a 5 V o 3,3 V.
- Cable GND: Este cable se conecta al potenciómetro de retroalimentación. Conéctelo a la tierra (GND).
- Cable del potenciómetro: También conocido como el cable de retroalimentación o de salida, este cable envía un voltaje que cambia en función de la posición del recorrido.
Cómo funciona
Cuando suministramos un voltaje alto a los cables positivo y negativo, el actuador se extenderá o se retraerá. Específicamente, si conectamos:
- Conecte 12V (como 12V, 24V, 48V, ...) y GND a los cables positivo y negativo, respectivamente: el actuador lineal se extiende a máxima velocidad hasta que se detenga al final.
- Conecte 12V (como 12V, 24V, 48V, ...) y GND a los cables negativo y positivo, respectivamente: el actuador lineal se retrae a máxima velocidad hasta que se detenga al final.
- Si se corta la energía del actuador (GND conectado a los cables positivo y negativo) mientras se está extendiendo o retrayendo, el actuador dejará de moverse.
※ Nota:
- La tensión necesaria para controlar el actuador varía según sus especificaciones. Consulte la hoja de datos o el manual para conocer la tensión adecuada.
- El actuador puede mantener su posición sin energía, incluso si está sosteniendo un peso.
El voltaje en el cable del potenciómetro cambia según la posición del actuador. Al verificar este voltaje, podemos saber en qué posición se encuentra el recorrido.
Diagrama de cableado
Antes de realizar el cableado, retire los tres puentes del módulo L298N.
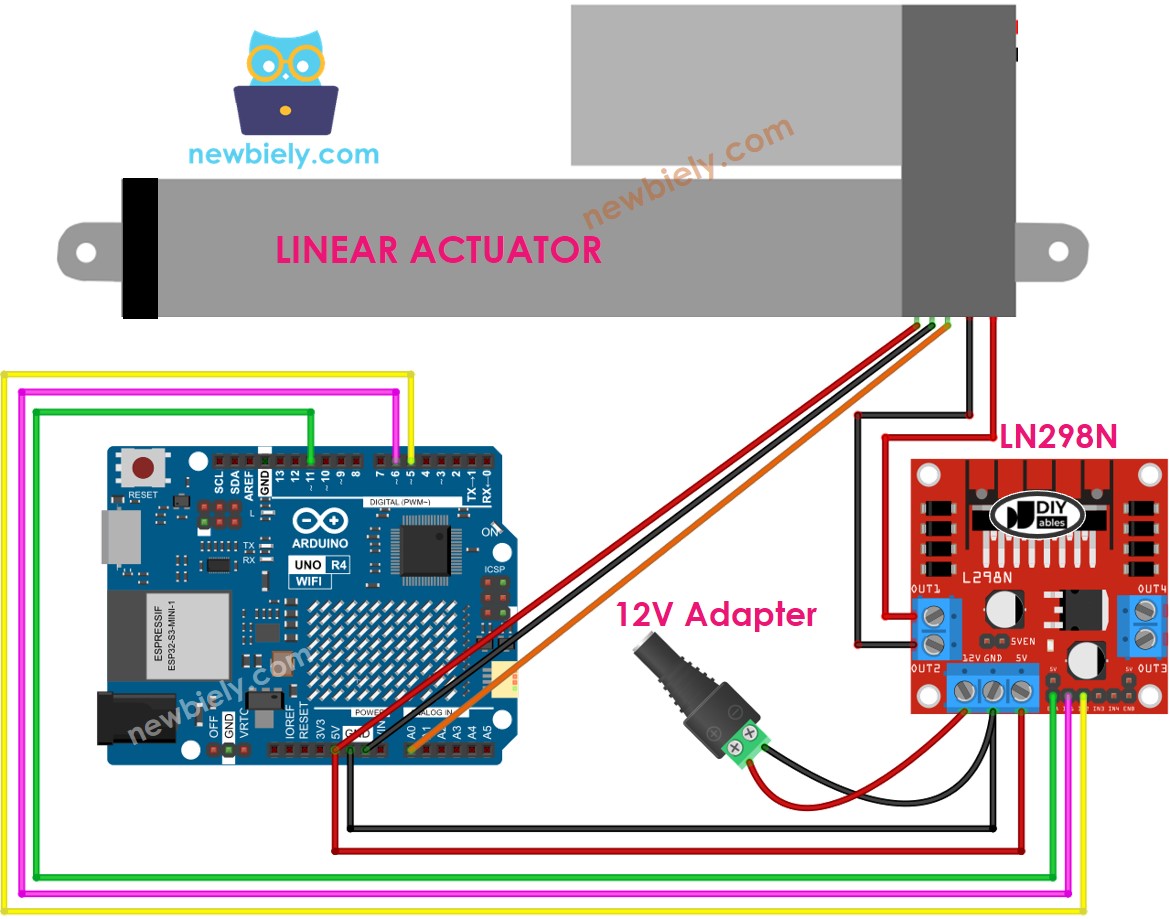
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Cómo controlar la extensión y la retracción de un actuador lineal
Visita el tutorial del Arduino UNO R4 Actuador aquí.
Cómo encontrar la posición del actuador lineal
Así es como se encuentra la posición de la carrera en un actuador lineal:
Calibración
- Mide la longitud de la carrera del actuador (en milímetros) con una regla o consulta la hoja de datos.
- Obtén los valores de salida cuando el actuador lineal esté completamente extendido y retraído ejecutando el siguiente código.
- Verá el registro en el Monitor Serial como se muestra en el ejemplo a continuación.
- Anota estos valores.
- Si los valores mínimo y máximo están invertidos, intercambia IN1_PIN con IN2_PIN.
- Actualiza tres valores en el código a continuación.
Código para Arduino UNO R4 que calcula la posición del actuador
- Modifica los tres valores ajustados en el código
- Carga el código en el Arduino UNO R4
- Verifica el resultado en el Monitor Serial
Cómo controlar un actuador lineal a una posición específica
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.
Resumen
En este tutorial de Arduino UNO R4, aprendiste a usar un actuador lineal con retroalimentación para proyectos de bricolaje. Esta guía sencilla te mostró cómo funciona el actuador, cómo determinar su posición en milímetros y cómo moverlo al lugar correcto con la programación de Arduino. Después de nuestra lección sobre un actuador lineal sin retroalimentación, este sencillo proyecto de Arduino te enseña a crear un sistema móvil inteligente. ¡Ahora puedes construir tus propios proyectos de control de movimiento con Arduino UNO R4!