Arduino UNO R4 - Joystick - servomotor
En esta guía, aprenderemos a usar un Arduino UNO R4 y un joystick para controlar dos servomotores o un kit de panorámica e inclinación.
Un joystick tiene dos controles llamados potenciómetros, colocados en ángulo recto entre sí, conocidos como el eje X y el eje Y. Estos potenciómetros producen señales, llamadas valores X e Y, que salen de los pines VRX y VRY del joystick. Utilizamos estas señales para controlar dos servomotores: el valor X mueve el servomotor n.º 1 y el valor Y mueve el servomotor n.º 2. Cuando se utilizan con un kit de paneo e inclinación, los dos servomotores trabajan juntos para moverse en tres dimensiones.
Hay dos ejemplos de cómo se puede usar la aplicación:
- Caso de uso 1: Los servomotores giran según cómo se mueve el joystick:
- Los ángulos de movimiento de los servomotores coinciden con los movimientos horizontales (X) y verticales (Y) del joystick.
- Soltar el joystick hace que éste y los servomotores vuelvan a su posición inicial.
- Caso de uso 2: Controla los servomotores con el joystick para diferentes direcciones:
- Empujar el joystick hacia la izquierda hace que el servomotor n.º 1 gire en sentido horario.
- Empujar el joystick hacia la derecha hace que el servomotor n.º 1 gire en sentido antihorario.
- Empujar el joystick hacia arriba hace que el servomotor n.º 2 gire en sentido horario.
- Empujar el joystick hacia abajo hace que el servomotor n.º 2 gire en sentido antihorario.
- Soltar el joystick no reinicia los servomotores.
- Al presionar hacia abajo el botón del joystick, los servomotores vuelven al centro.
- Si es la primera vez que usas Arduino Uno R4 WiFi/Minima, consulta el tutorial sobre la configuración del entorno para Arduino Uno R4 WiFi/Minima en el IDE de Arduino.
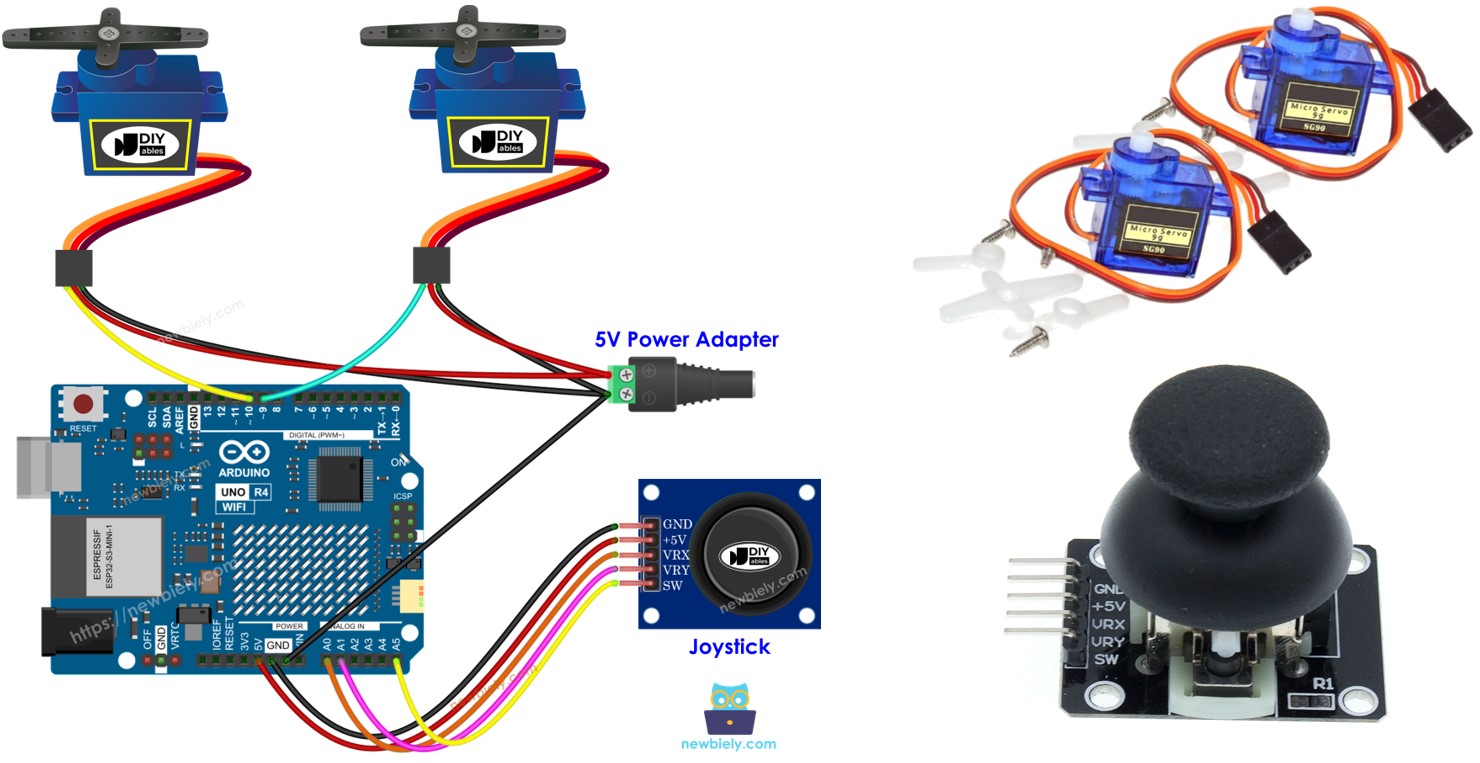
- Conecta la placa Arduino Uno R4 al motor servo y al joystick según el diagrama proporcionado.
- Conecta la placa Arduino Uno R4 a tu computadora mediante un cable USB.
- Inicia el IDE de Arduino en tu computadora.
- Selecciona la placa Arduino Uno R4 adecuada (p. ej., Arduino Uno R4 WiFi) y el puerto COM.
- Copia el código proporcionado y ábrelo en el IDE de Arduino.
- Haz clic en el botón Cargar del IDE de Arduino para transferir el código a tu Arduino UNO R4.
- Abre el Monitor Serial.
- Mueve el joystick en cualquier dirección.
- Observa la rotación del servomotor.
- Verifica el resultado en el Monitor Serial.
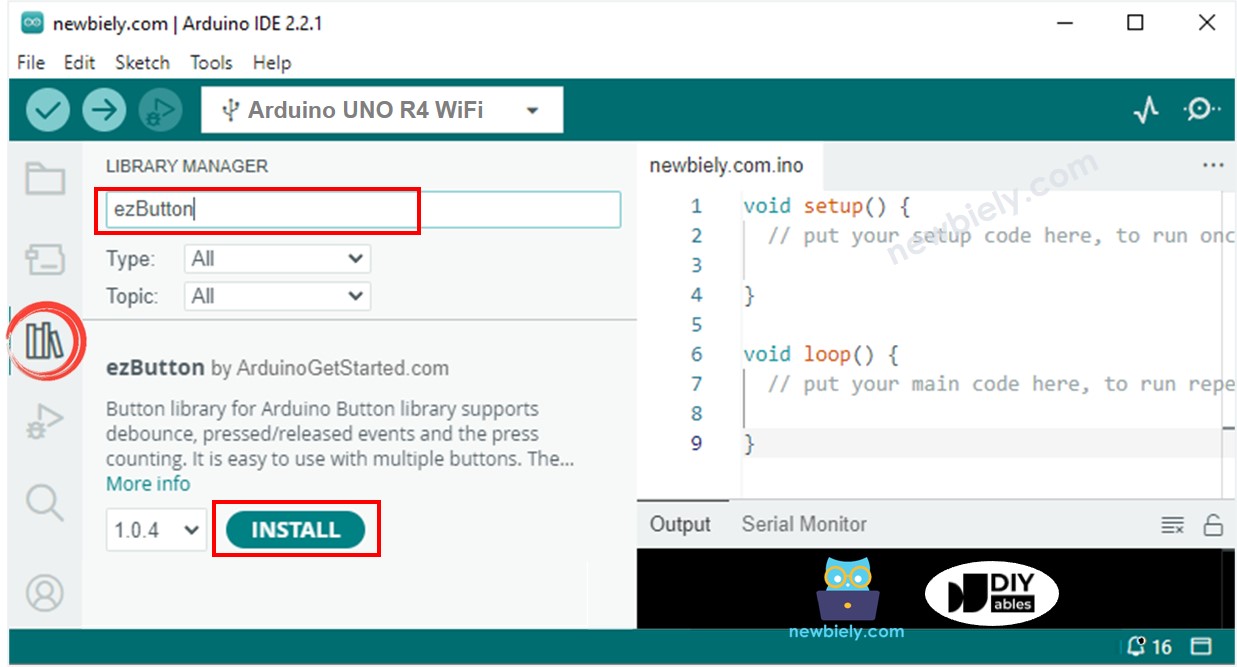
- Ve al ícono de Bibliotecas en el lado izquierdo del IDE de Arduino.
- Escribe ezButton en la caja de búsqueda, y busca la biblioteca de botones de ArduinoGetStarted.com.
- Haz clic en el botón Instalar para agregar la biblioteca ezButton.
- Copie el código proporcionado y ábralo en el IDE de Arduino.
- Haga clic en el botón Cargar en el IDE de Arduino para enviar el código al Arduino UNO R4.
- Abra el Monitor serial.
- Mueva el joystick en cualquier dirección.
- Observe cómo gira el servomotor.
- Revise los resultados en el Monitor serial.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del joystick y del servomotor
Si no está familiarizado con los detalles de un joystick y de un motor servo, como el esquema de pines, la funcionalidad y la programación, por favor consulte los tutoriales siguientes para obtener más información.
Diagrama de Cableado
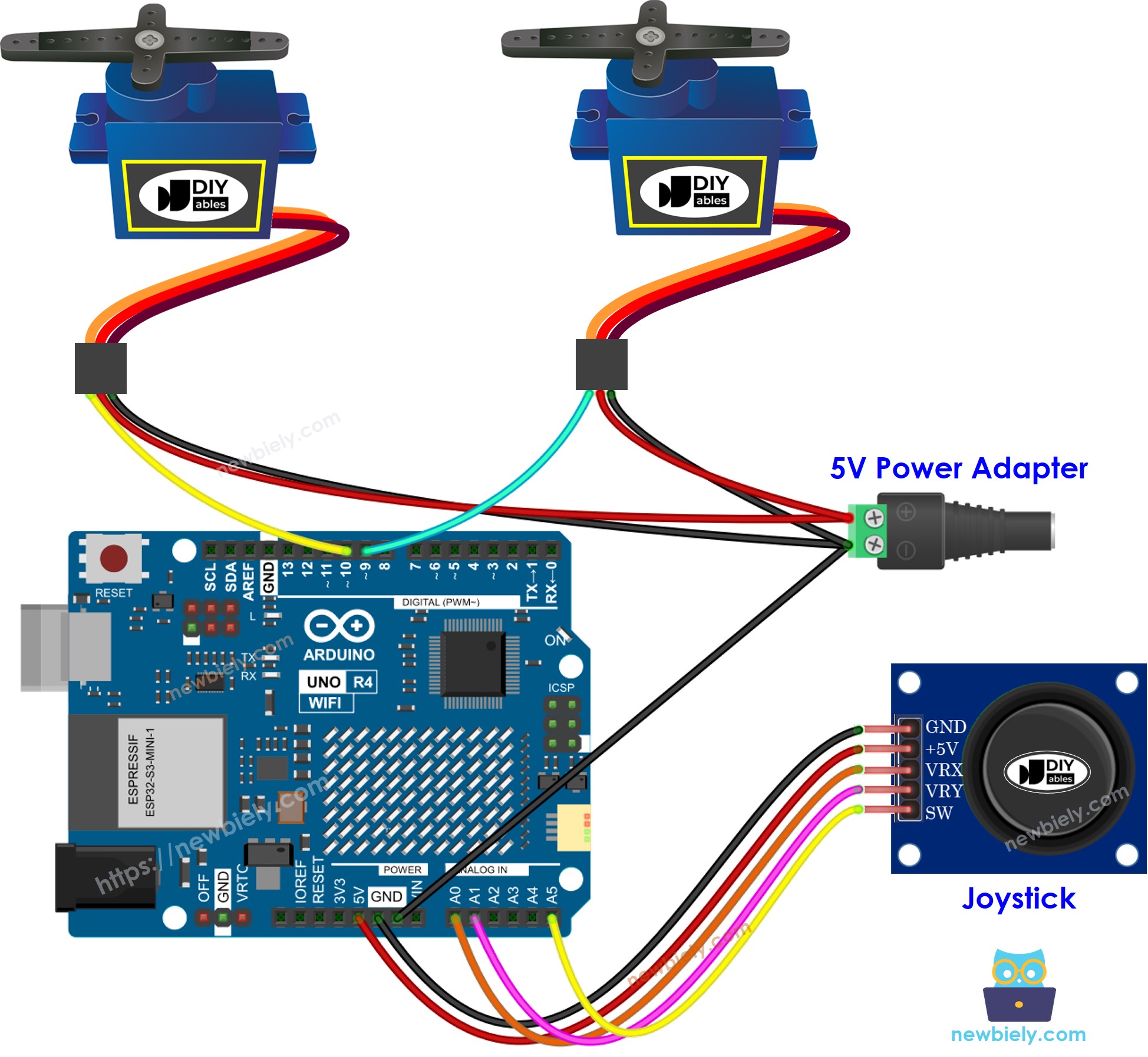
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Código de Arduino UNO R4
Código de Arduino UNO R4 - Los servomotores giran de acuerdo con el movimiento del pulgar del joystick.
Pasos R\u00e1pidos
Siga estas instrucciones paso a paso:

Código para Arduino UNO R4 - Usa el joystick para controlar servomotores
Pasos R\u00e1pidos
Explicación del código
¡Revisa las explicaciones dadas en los comentarios dentro del código fuente!
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.