Arduino UNO R4 - Botón - Servomotor
En este tutorial, aprenderemos cómo controlar un servomotor con un botón usando un Arduino Uno R4. Presionar el botón hará que el servomotor gire a 90 grados, y presionarlo de nuevo lo devolverá a 0 grados. Este proceso se repite cada vez que se presiona el botón.
El tutorial está dividido en dos secciones:
- Sin anti-rebote: El motor servo responde a las pulsaciones del botón sin gestionar el ruido de la señal.
- Con anti-rebote: El código incluye lógica de anti-rebote para evitar activaciones falsas y garantizar pulsaciones del botón confiables.
Este proyecto es excelente para que los principiantes comprendan el control de motores servo, las entradas de botones y las técnicas de antirrebote con Arduino Uno R4.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del servomotor y del botón
Si no está familiarizado con los motores servo y los botones, incluyendo su distribución de pines, cómo funcionan o cómo programarlos, por favor consulte los tutoriales siguientes para obtener más información.
Diagrama de Cableado
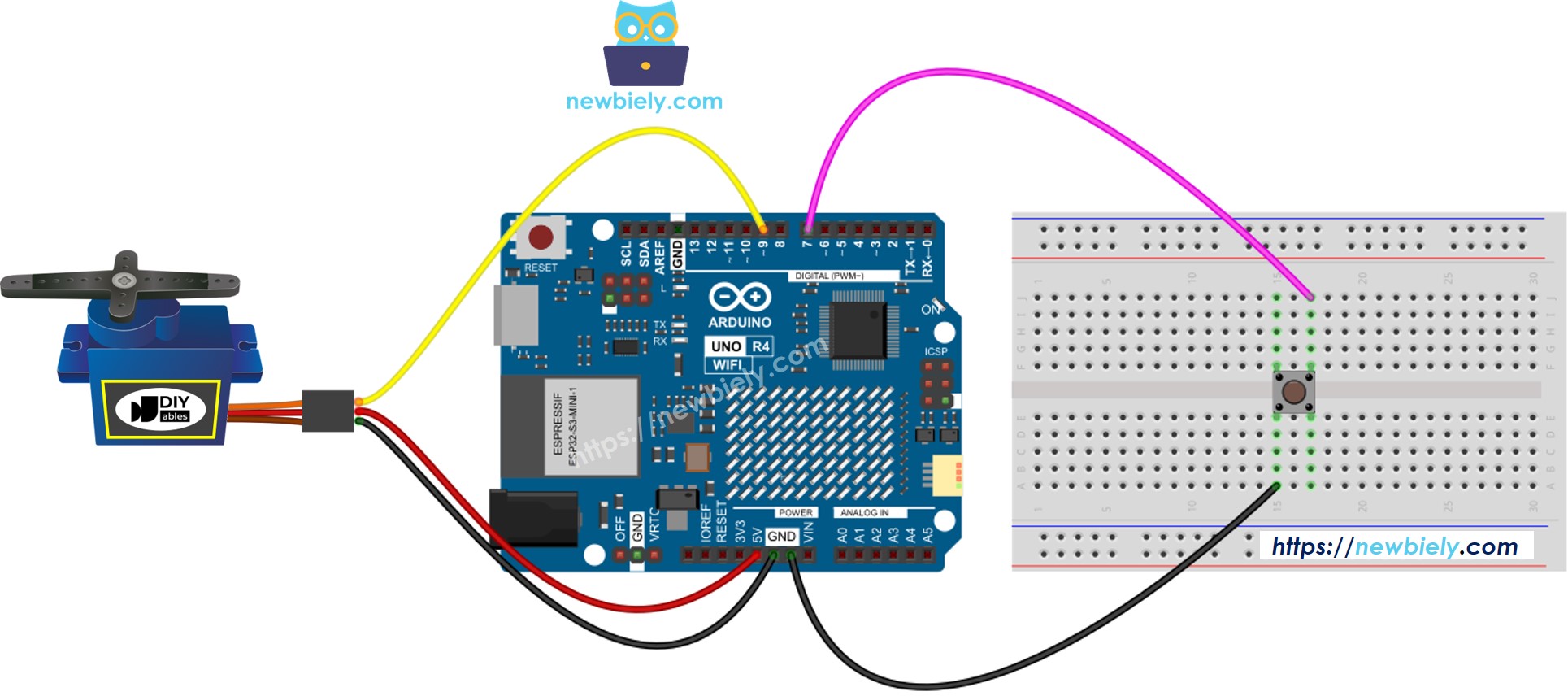
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Código para Arduino UNO R4 - Botón que controla el servomotor sin antirrebote
Pasos R\u00e1pidos
Siga estas instrucciones paso a paso:
- Si es la primera vez que usas el Arduino Uno R4 WiFi/Minima, consulta el tutorial sobre configurar el entorno para Arduino Uno R4 WiFi/Minima en el IDE de Arduino.
- Conecta los componentes de acuerdo con el diagrama proporcionado.
- Conecta la placa Arduino Uno R4 a tu computadora usando un cable USB.
- Inicia el IDE de Arduino en tu computadora.
- Selecciona la placa adecuada Arduino Uno R4 (p. ej., Arduino Uno R4 WiFi) y el puerto COM.
- Copia y pega el código anterior en el IDE de Arduino.
- Haz clic en el botón Subir en el IDE de Arduino para transferir el código al Arduino UNO R4.
- Presiona el botón varias veces.
- Observa el movimiento del servomotor.
※ Nota:
A veces el código proporcionado no funciona correctamente. Para garantizar que siempre funcione correctamente, necesitamos usar el antirrebote de botones. El antirrebote de botones puede ser un desafío para los principiantes. Sin embargo, con la ayuda de la biblioteca ezButton, se vuelve mucho más fácil.
Código Arduino UNO R4 - Botón que controla el servomotor con antirrebote
¿Por qué es importante el antirrebote? ⇒ ver Arduino UNO R4 - Tutorial de antirrebote de botón
Pasos R\u00e1pidos
- Instala la biblioteca ezButton. Consulta Cómo instalar la biblioteca
- Copia el código y ábrelo en Arduino IDE
- Haz clic en el botón Subir en Arduino IDE para transferir el código al Arduino UNO R4
- Pulsa el botón varias veces
- Observa cómo se mueve el servomotor
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.