Arduino UNO R4 - servomotor
Este tutorial te enseña cómo controlar un motor servo con un Arduino UNO R4. Específicamente, aprenderemos:
- Programar Arduino UNO R4 para controlar un servomotor
- Programar Arduino UNO R4 para controlar la velocidad de un servomotor
- Usar alimentación externa para los servomotores
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables STEM V4 IoT Starter Kit (Arduino included) | |
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
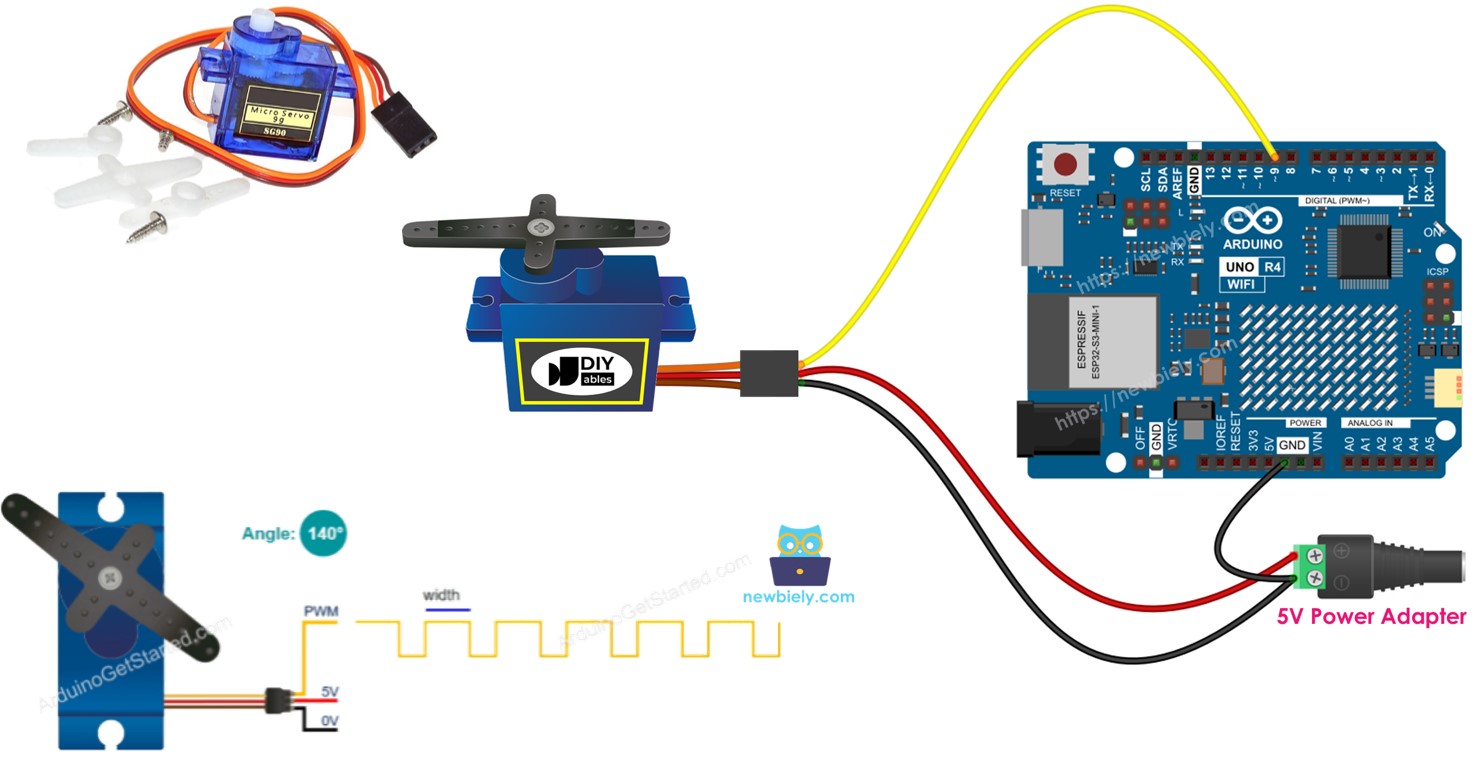
Acerca del servomotor
Un servomotor es un componente que puede girar su eje, usualmente de 0 a 180 grados. Se utiliza para controlar el ángulo de un objeto.
Disposición de pines
Este ejemplo utiliza un servomotor con tres pines:
- Pin VCC: Conecta el cable rojo al VCC (5 voltios).
- Pin GND: Conecta el cable negro o marrón a GND (0 voltios).
- Pin de señal: Conecta el cable amarillo o naranja para recibir la señal de control PWM desde un pin del Arduino UNO R4.

Diagrama de Cableado
A veces, puedes ver diagramas de cableado en línea que muestran una conexión entre el pin VCC de un servomotor y el pin de 5 V en la placa Arduino UNO R4. Es mejor evitar este método porque podría dañar la placa Arduino UNO R4.
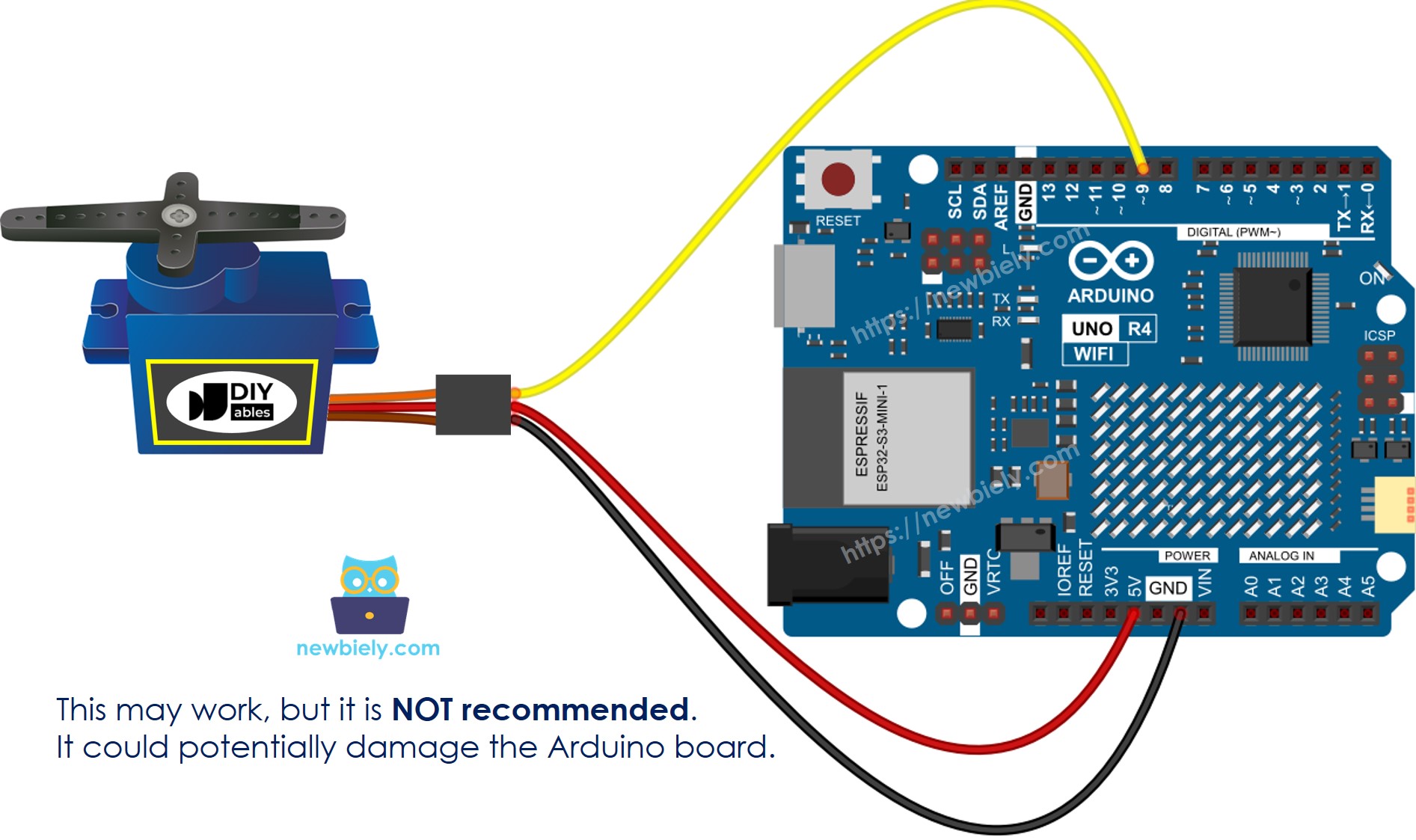
This image is created using Fritzing. Click to enlarge image
Para proteger tu placa Arduino UNO R4, es mejor usar una fuente de alimentación externa para el servomotor. El diagrama de cableado que se muestra a continuación indica cómo conectar el servomotor a una fuente de alimentación externa.
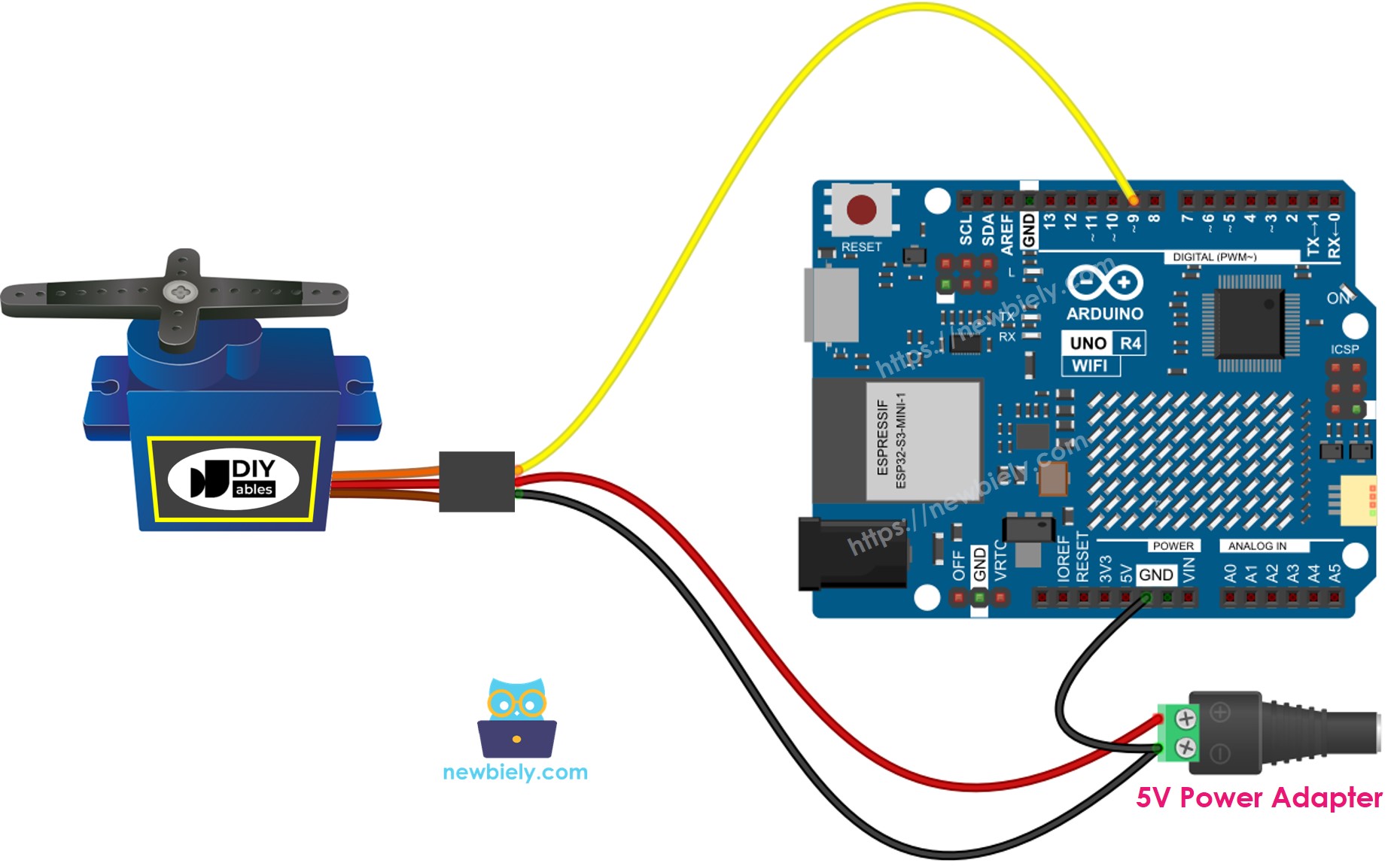
This image is created using Fritzing. Click to enlarge image
Ver La mejor forma de alimentar Arduino Uno R4 y otros componentes.
Asegúrate de conectar la GND (tierra) de la fuente de alimentación externa a la GND de la placa Arduino UNO R4. Este paso es muy importante para que funcione correctamente.
Cómo programar para un servomotor
- Incluir la biblioteca:
- Crear un objeto Servo:
Si gestionas varios servomotores, simplemente declara objetos Servo adicionales.
- Conecta el pin de control del Arduino UNO R4 al pin de señal del servomotor, por ejemplo, el pin 9.
- Por último, gire el servomotor al ángulo que necesite, como 90 grados.
Código de Arduino UNO R4
Pasos R\u00e1pidos
Sigue estas instrucciones paso a paso:
- Si es la primera vez que usas el Arduino Uno R4 WiFi/Minima, consulta el tutorial sobre configurar el entorno para Arduino Uno R4 WiFi/Minima en el IDE de Arduino.
- Conecta los componentes de acuerdo con el diagrama proporcionado.
- Conecta la placa Arduino Uno R4 a tu computadora con un cable USB.
- Inicia el IDE de Arduino en tu computadora.
- Selecciona la placa Arduino Uno R4 adecuada (p. ej., Arduino Uno R4 WiFi) y el puerto COM.
- Pega el código anterior en el IDE de Arduino.
- Presiona el botón Subir en el IDE de Arduino para enviar el código al Arduino Uno R4.

- Observa lo que sucede: el servomotor gira lentamente de 0 a 180 grados y luego gira lentamente de 180 a 0 grados.
Explicación del código
Puede ver la explicación en la sección de comentarios del código de Arduino anterior.
Cómo controlar la velocidad de un servomotor
El uso de las funciones map() y millis() nos permite ajustar suavemente la velocidad de un servomotor mientras el resto del código se ejecuta sin interrupciones.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.