Arduino Nano ESP32 - Sensor de Obstáculos
Este tutorial le enseña cómo usar Arduino Nano ESP32 con el sensor de evitación de obstáculos por infrarrojos para detectar la presencia del obstáculo.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
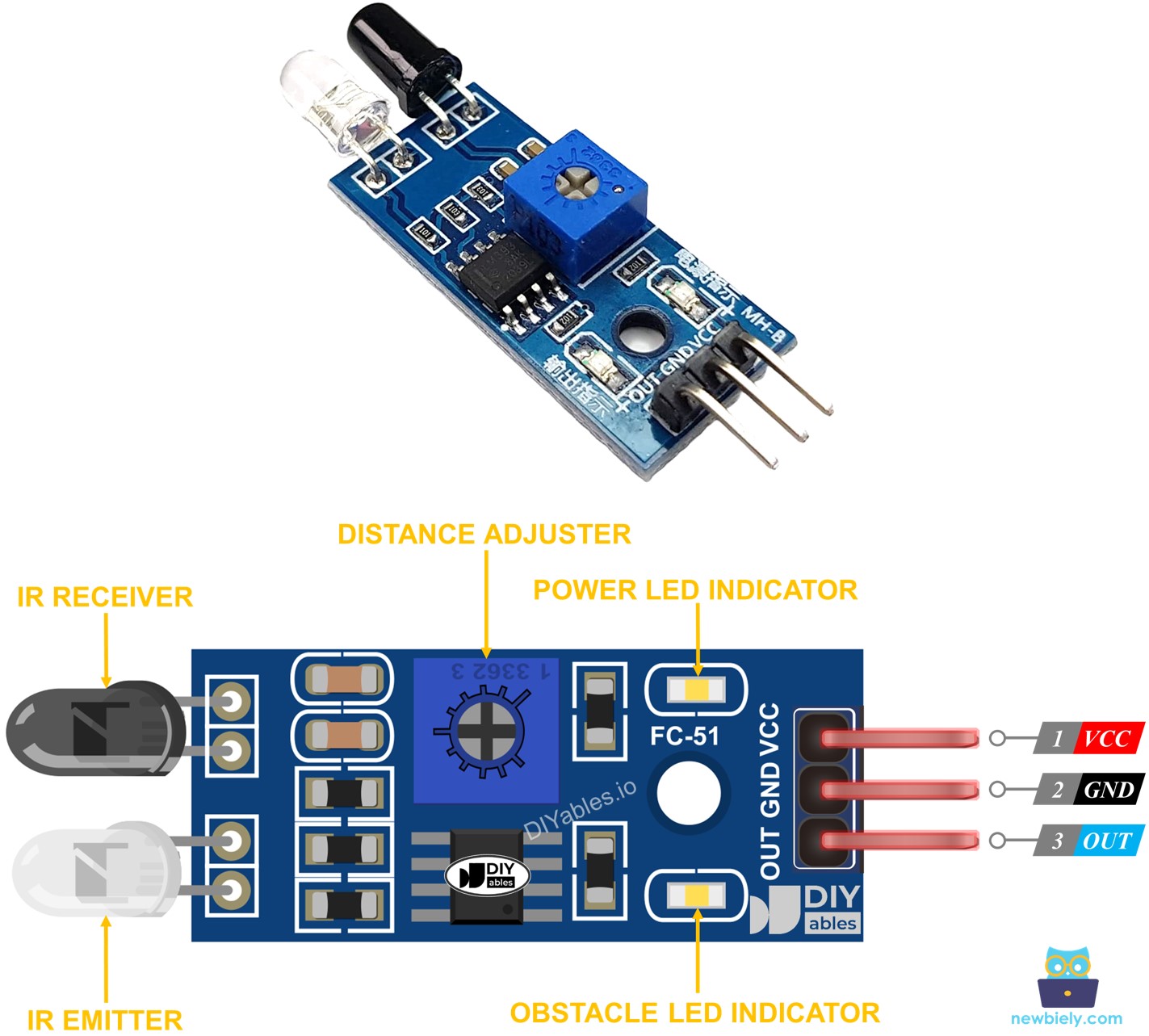
Acerca del sensor de evitación de obstáculos por infrarrojos
El sensor de obstáculos por infrarrojos (IR) se utiliza para detectar si hay algún obstáculo delante del módulo del sensor mediante la señal IR. El rango de detección es de 2 cm a 30 cm y es ajustable mediante un potenciómetro incorporado.
Esquema de pines
Un sensor de evitación de obstáculos por infrarrojos tiene tres pines:
- Pin GND: conecta este pin a GND (0V)
- Pin VCC: conecta este pin a VCC (5V o 3.3V)
- Pin OUT: es un pin de salida: BAJO si hay un obstáculo presente, ALTO si no hay obstáculo presente. Este pin debe conectarse al pin de entrada del ESP32.
Cómo funciona
Un módulo de sensor de obstáculos por infrarrojos consta de un transmisor infrarrojo y un receptor infrarrojo. El transmisor infrarrojo emite la señal infrarroja, mientras que el receptor infrarrojo busca la señal infrarroja reflejada para determinar si el objeto está presente o no. La presencia de un obstáculo se refleja en el pin OUT:
- Si hay un obstáculo, el pin de salida del sensor está en BAJO
- Si no hay obstáculo, el pin de salida del sensor está en ALTO
※ Nota:
Durante el envío, el sensor puede deformarse, lo que puede hacer que funcione mal. Si el sensor no funciona correctamente, ajuste el transmisor IR y el receptor para asegurarse de que estén paralelos.
Diagrama de Cableado
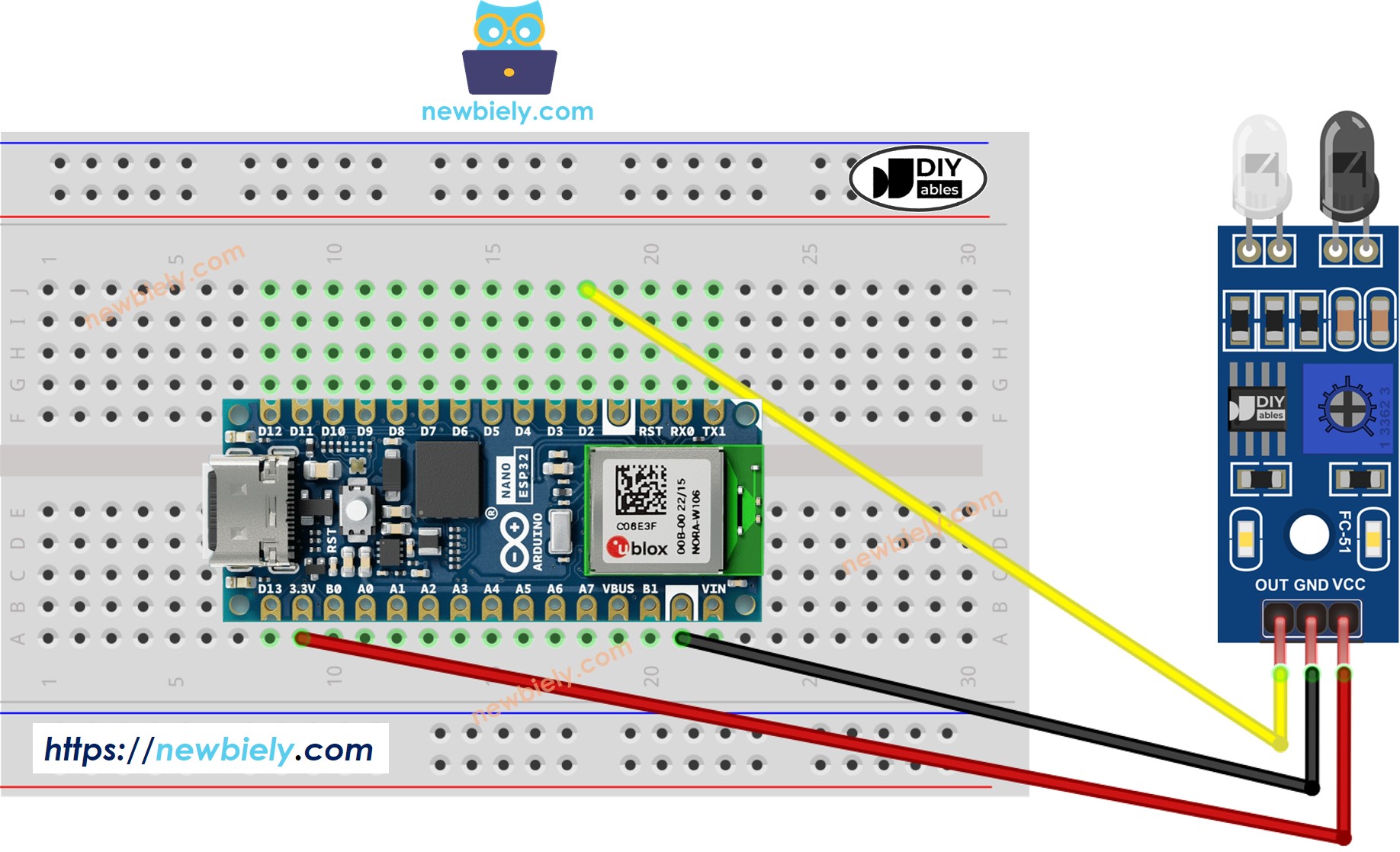
This image is created using Fritzing. Click to enlarge image
Cómo programar para el sensor de evitación de obstáculos por infrarrojos
- Inicializa el pin del Arduino Nano ESP32 en modo de entrada digital usando la función pinMode(). Por ejemplo, el pin D2.
- Lee el estado del pin del Arduino Nano ESP32 utilizando la función digitalRead().
Código de Arduino Nano ESP32
Hay dos casos de uso para implementar una aplicación de evitación de obstáculos:
- Tomar acciones mientras el obstáculo esté presente o ausente
- Tomar acciones cuando se detecte el obstáculo o cuando se haya despejado
Código Arduino Nano ESP32 para comprobar si el obstáculo está presente
Pasos R\u00e1pidos
- Si esta es la primera vez que usa Arduino Nano ESP32, consulte cómo configurar el entorno para Arduino Nano ESP32 en Arduino IDE.
- Copie el código anterior y péguelo en el IDE de Arduino.
- Compilar y subir el código a la placa Arduino Nano ESP32 haciendo clic en el botón Subir en el IDE de Arduino.
- Coloque un obstáculo frente al sensor durante un rato, y luego retírelo.
- Verifique el resultado en el Monitor Serial. A continuación se muestra:
Código de Arduino Nano ESP32 para detectar obstáculos
Pasos R\u00e1pidos
- Copia el código anterior y pégalo en el IDE de Arduino.
- Compila y sube el código a la placa Arduino Nano ESP32 haciendo clic en el botón Subir en el IDE de Arduino.
- Coloca un obstáculo frente al sensor durante un rato y luego retíralo.
- Revisa el Monitor serie. Se ve como se muestra a continuación:
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.