Arduino Nano ESP32 - Coche
Una de las cosas más geniales para probar si apenas estás empezando con Arduino Nano ESP32 es hacer un coche robot. En esta guía, aprenderemos a usar Arduino Nano ESP32 para construir un coche robot y controlarlo con un control remoto por infrarrojos. Para controlar el coche robot a través de la Web (WiFi), consulta el tutorial Arduino Nano ESP32 controla el coche vía Web.

Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca de Robot Car
En el contexto de Arduino Nano ESP32, el coche robot suele recibir diferentes nombres como coche robot, coche RC, coche de control remoto, coche inteligente o coche de bricolaje. Se puede controlar a distancia sin cables. Puedes usar ya sea un control remoto especial que utiliza luz infrarroja o una aplicación para teléfono inteligente a través de Bluetooth o WiFi. El coche robot puede ir hacia la izquierda o hacia la derecha y también avanzar o retroceder.
Un coche de tracción en dos ruedas (2WD) para Arduino Nano ESP32 es un pequeño vehículo robótico que puedes construir y controlar utilizando una placa Arduino Nano ESP32. Generalmente consta de los siguientes componentes:
- Chasis: La base o el armazón del coche, donde se montan todos los demás componentes.
- Ruedas: Las dos ruedas que proporcionan locomoción al coche. Están conectadas a dos motores de corriente continua.
- Motores: Se utilizan dos motores de corriente continua para impulsar las dos ruedas.
- Controlador de motores: La placa controladora de los motores es un componente esencial que hace de interfaz entre el Arduino Nano ESP32 y los motores. Toma las señales del Arduino Nano ESP32 y proporciona la potencia y el control necesarios a los motores.
- Placa Arduino Nano ESP32: El cerebro del coche. Lee las entradas de sensores y comandos del usuario y controla los motores en consecuencia.
- Fuente de alimentación: El coche con tracción en dos ruedas (2WD) requiere una fuente de alimentación, normalmente baterías y un soporte para baterías, para alimentar los motores y la placa Arduino Nano ESP32.
- Receptor inalámbrico: un módulo infrarrojo, Bluetooth o WiFi para la comunicación inalámbrica con un control remoto o teléfono inteligente.
- Componentes opcionales: Dependiendo de la complejidad de tu proyecto, puedes añadir varios componentes opcionales como sensores (por ejemplo, sensores ultrasónicos para evitar obstáculos, sensores de seguimiento de línea), y más.
En este tutorial, para simplificarlo, usaremos:
- Kit de coche 2WD (incluye chasis, ruedas, motores, soporte para batería)
- Controlador de motor L298N
- Kit infrarrojo (incluye controlador IR y receptor IR)
Verifique la lista de hardware en la parte superior de esta página.
Cómo funciona
- El Arduino Nano ESP32 se conecta a los motores de corriente continua del coche robot mediante el módulo controlador de motor L298N.
- El Arduino Nano ESP32 se conecta a un receptor IR.
- La batería alimenta al ESP32, los motores de corriente continua, el controlador de motor y el receptor IR.
- Los usuarios pulsan las teclas ARRIBA/ABAJO/IZQUIERDA/DERECHA/OK en el control remoto IR.
- El Arduino Nano ESP32 recibe los comandos ARRIBA/ABAJO/IZQUIERDA/DERECHA/OK a través del receptor IR.
- El Arduino Nano ESP32 controla el coche para moverse ADELANTE/ATRÁS/IZQUIERDA/DERECHA/DETENER mediante el módulo controlador de motor.
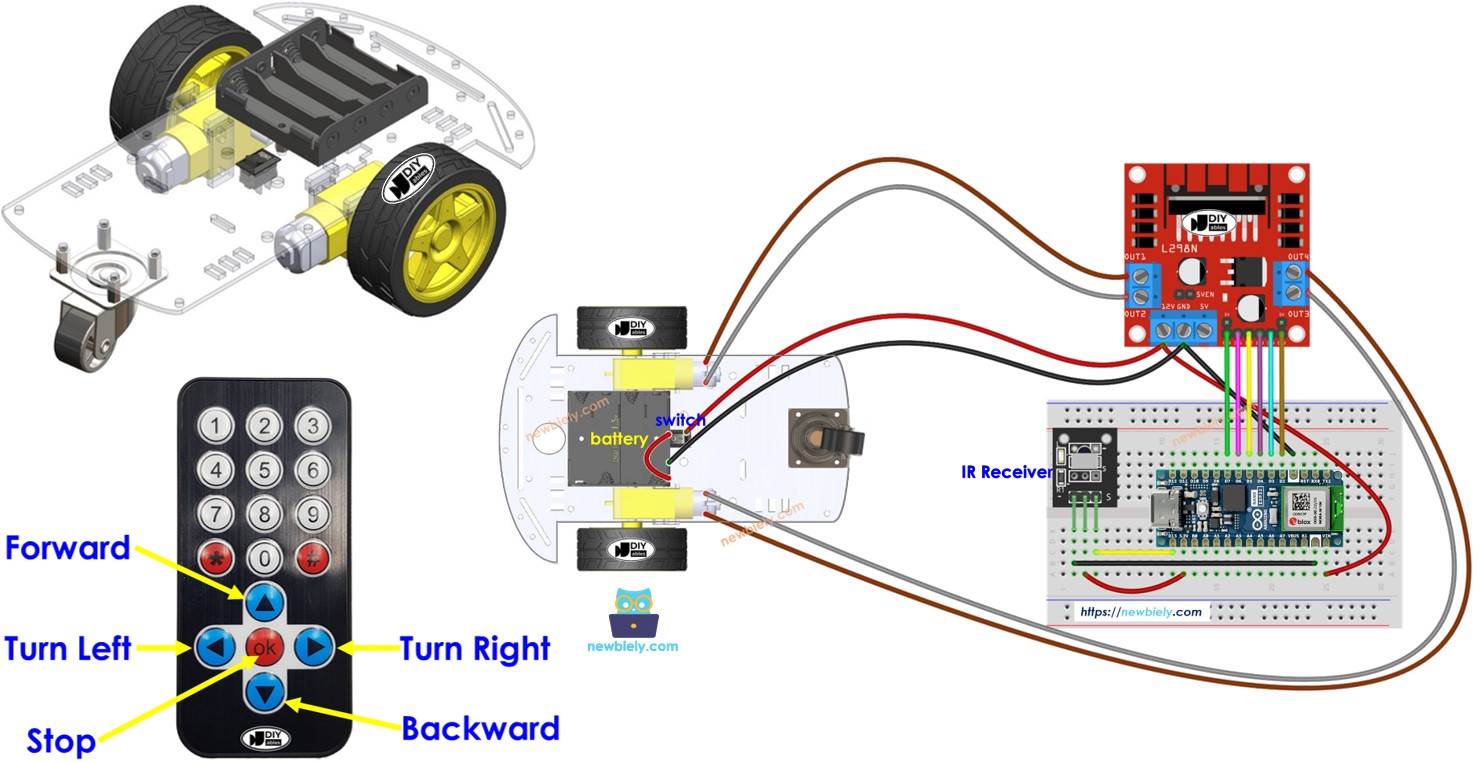
Diagrama de Cableado
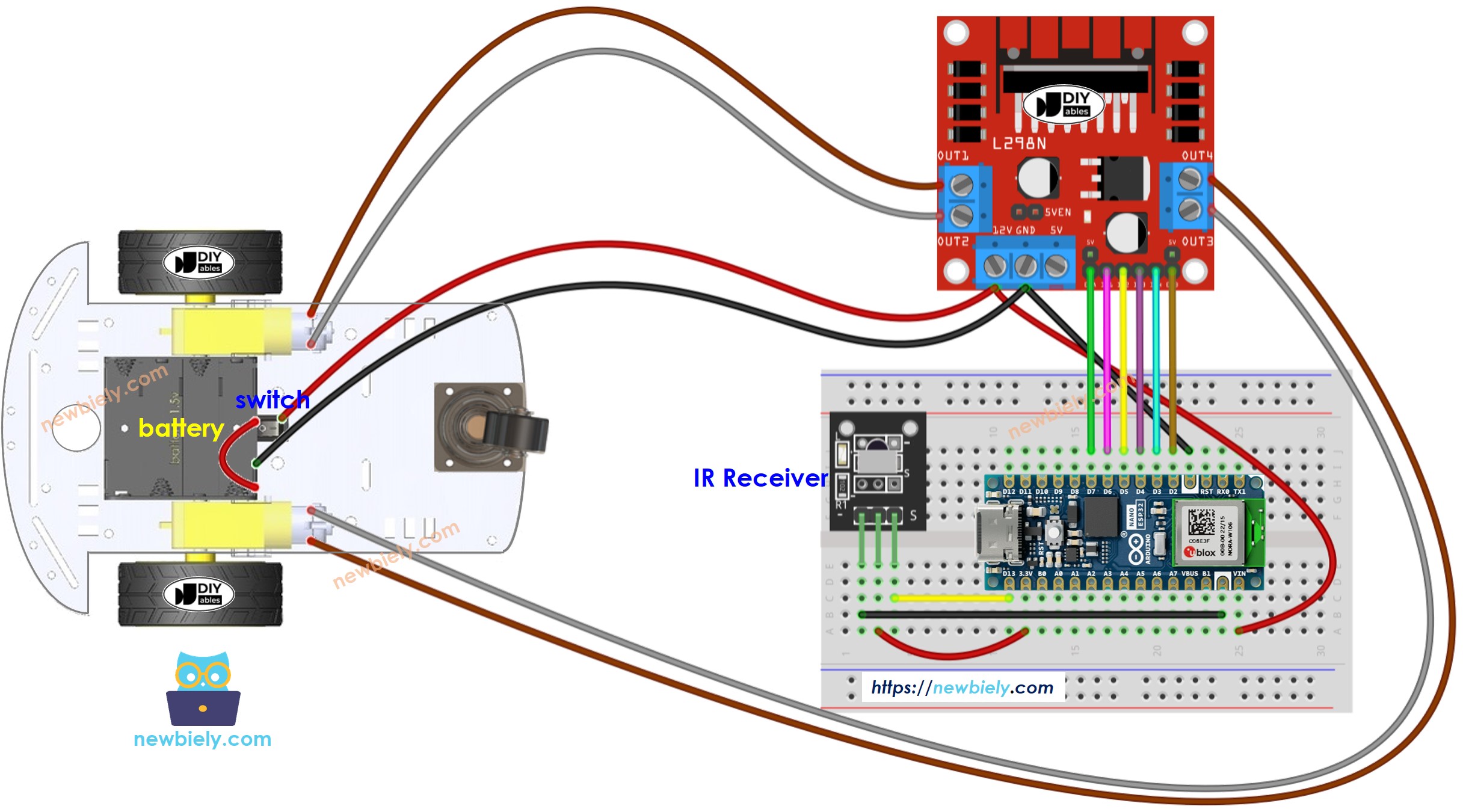
This image is created using Fritzing. Click to enlarge image
Normalmente, se requieren dos fuentes de energía:
- Uno para el motor (indirectamente a través del módulo L298N).
- Otro para la placa Arduino Nano ESP32, el módulo L298N y el receptor IR.
Sin embargo, hay un método para simplificar esto usando una única fuente de alimentación para todo. Puedes lograrlo usando cuatro pilas de 1,5 V (un total de 6 V). Así es como puedes hacerlo:
- Conecte las baterías al módulo L298N tal como se muestra en el diagrama.
- Retire dos jumpers que conectan las patillas ENA y ENB a 5 voltios en el módulo L298N.
- Coloque un jumper etiquetado 5VEN, que está marcado con un círculo amarillo en el diagrama.
- Conecte el pin 12V del terminal de tornillo del módulo L298N al pin Vin de la placa Arduino Nano ESP32. Esto proporciona energía al Arduino Nano ESP32 directamente de las baterías (6V).
Código de Arduino Nano ESP32
Pasos R\u00e1pidos
- Si es la primera vez que usas Arduino Nano ESP32, consulta cómo configurar el entorno para Arduino Nano ESP32 en Arduino IDE.
- Instala la biblioteca DIYables_IRcontroller en Arduino IDE siguiendo esta instrucción
- Realiza el cableado tal como se muestra en el diagrama anterior.
- Desconecta el cable del Vin en el ESP32 porque alimentaremos Arduino Nano ESP32 mediante un cable USB al subir el código.
- Gira el coche boca abajo para que las ruedas queden en la parte superior.
- Conecta la placa Arduino Nano ESP32 a tu PC mediante un cable USB.
- Abre Arduino IDE en tu PC.
- Selecciona la placa correcta Arduino Nano ESP32 y el puerto COM.
- Copia el código proporcionado y ábrelo en Arduino IDE.
- Haz clic en el botón Subir en Arduino IDE para transferir el código al Arduino Nano ESP32.
- Utiliza el control remoto IR para que el coche avance, retroceda, gire a la izquierda, gire a la derecha o se detenga.
- Verifica si las ruedas se mueven correctamente de acuerdo con tus comandos.
- Si las ruedas se mueven en la dirección opuesta, invierte los cables del motor DC en el módulo L298N.
- También puedes ver los resultados en el Monitor Serial del Arduino IDE.
- Si todo va bien, desenchufa el cable USB del ESP32, y luego conecta de nuevo el cable al pin Vin 5V. Esto alimentará al Arduino Nano ESP32 desde la batería.
- Devuelve el coche a su posición normal con las ruedas en el suelo.
- ¡Diviértete controlando el coche!
Explicación del código
Puedes encontrar la explicación en la línea de comentarios del código de Arduino anterior.
Puedes aprender más sobre el código consultando los siguientes tutoriales:
- Arduino Nano ESP32 - DC motor tutorial
Puedes ampliar este proyecto mediante:
- Añadiendo sensores de evitación de obstáculos para detener inmediatamente el coche si se detecta un obstáculo.
- Añadiendo una función para controlar la velocidad del coche (ver Arduino Nano ESP32 - motor de corriente continua tutorial). El código proporcionado controla el coche a máxima velocidad.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.