Arduino Nano ESP32 - MG996R
En este tutorial, vamos a aprender a usar el servomotor MG996R de alto torque con Arduino Nano ESP32.
Hardware Requerido
Or you can buy the following kits:
| 1 | × | DIYables Sensor Kit (30 sensors/displays) | |
| 1 | × | DIYables Sensor Kit (18 sensors/displays) |
Acerca del servomotor
El servomotor MG996R es un servomotor de alto torque capaz de levantar hasta 15 kg de peso. El motor puede girar su eje de 0° a 180°, proporcionando un control preciso de la posición angular. Para información básica sobre servomotores, consulte el tutorial Arduino Nano ESP32 - Servo Motor.
Diagrama de pines
El servomotor MG996R utilizado en este ejemplo incluye tres pines:
- Pin VCC: (normalmente rojo) debe conectarse a VCC (4.8V – 7.2V)
- Pin GND: (normalmente negro o marrón) debe conectarse a GND (0V)
- Pin de señal: (normalmente amarillo o naranja) recibe la señal de control PWM desde un pin del ESP32.

Diagrama de Cableado
Como el MG996R es un servomotor de alto torque, consume mucha energía. No deberíamos alimentar este motor a través del pin de 5 V de Arduino Nano ESP32. En su lugar, debemos usar una fuente de alimentación externa para el servomotor MG996R.
- Al alimentar la placa Arduino Nano ESP32 a través del puerto USB.
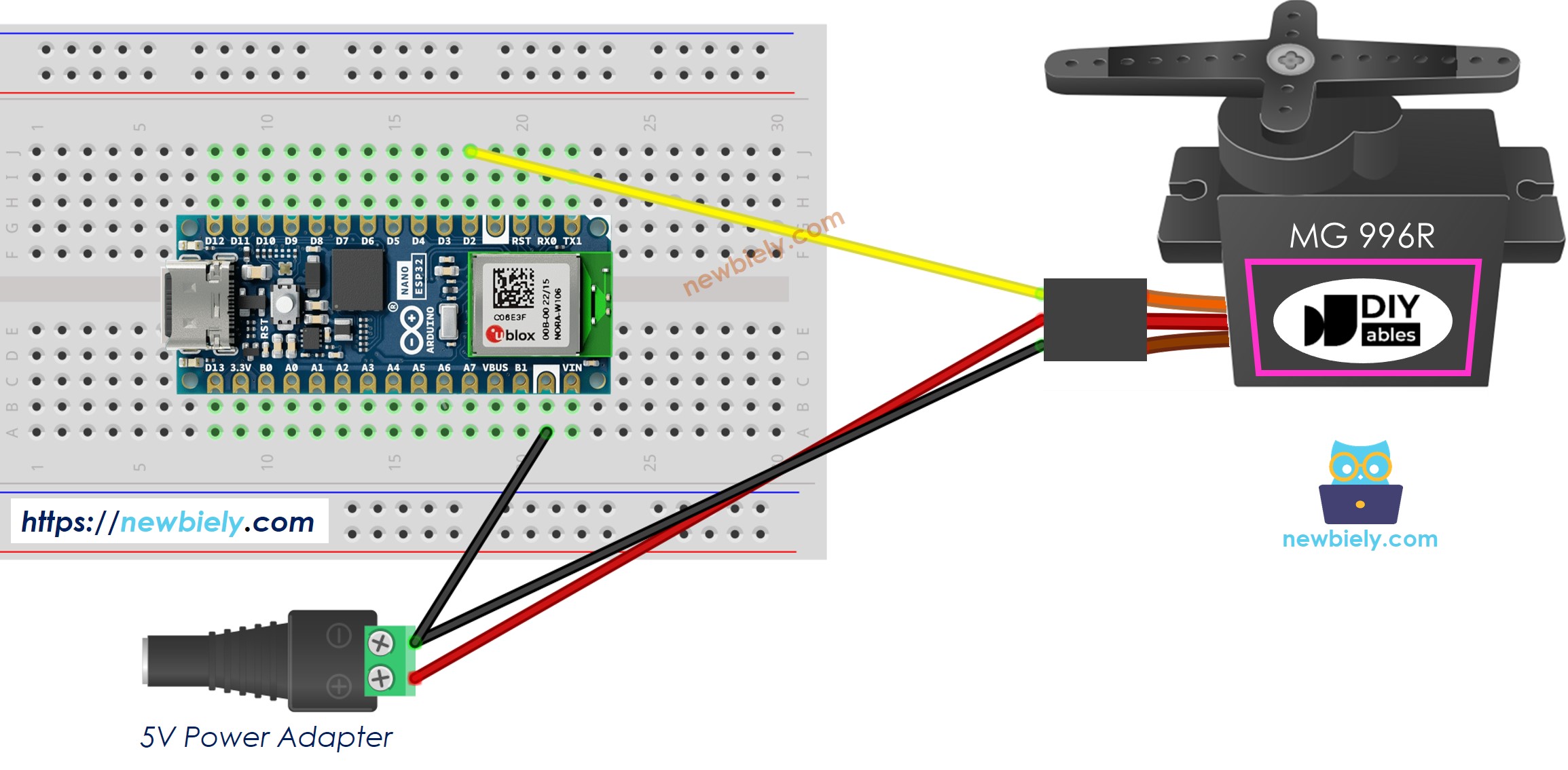
This image is created using Fritzing. Click to enlarge image
- Al alimentar la placa Arduino Nano ESP32 a través del pin Vin.
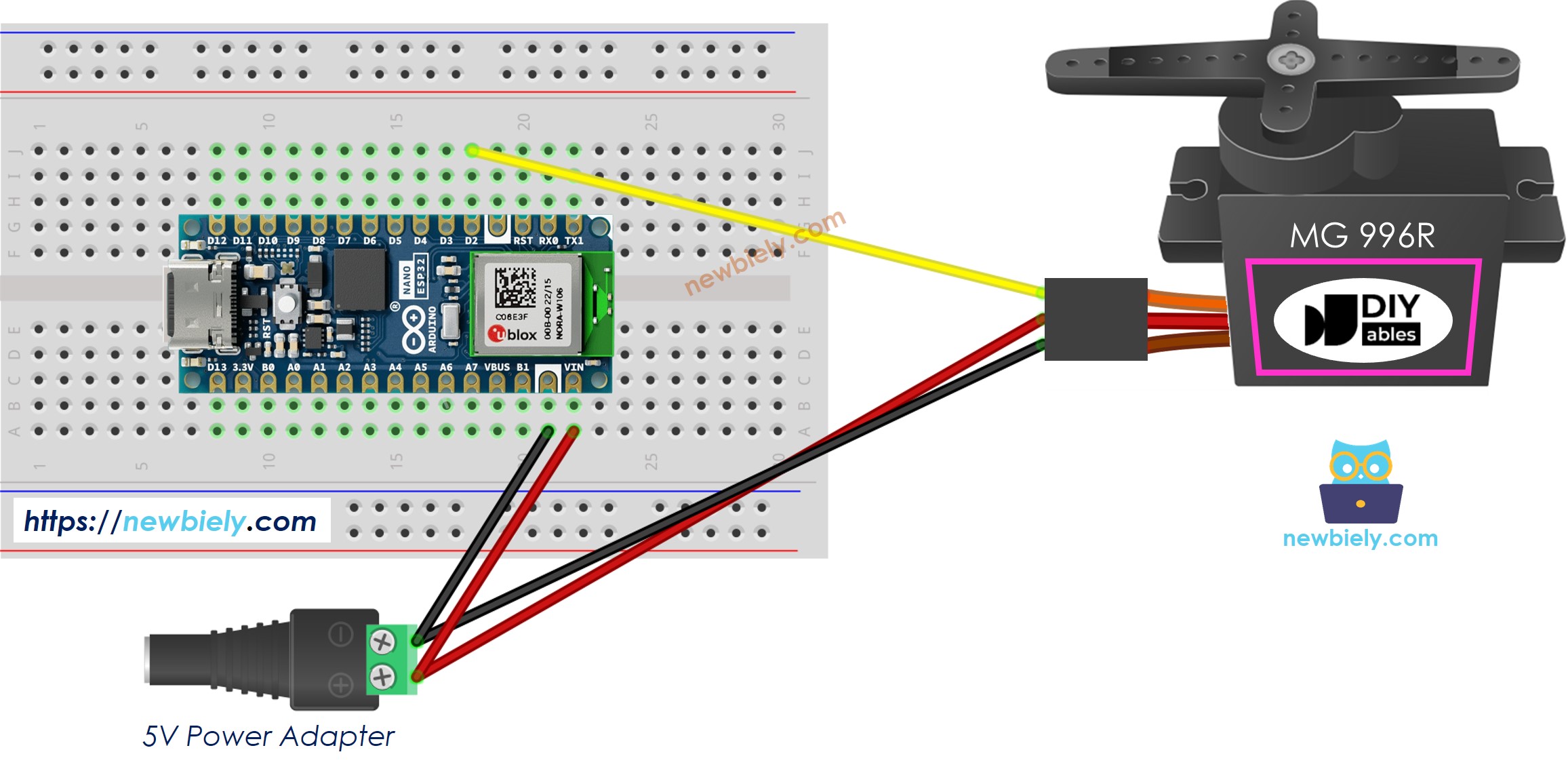
This image is created using Fritzing. Click to enlarge image
Código de Arduino Nano ESP32
Pasos R\u00e1pidos
Para empezar con Arduino Nano ESP32, sigue estos pasos:
- Si eres nuevo en Arduino Nano ESP32, consulta el tutorial sobre cómo configurar el entorno para Arduino Nano ESP32 en el IDE de Arduino.
- Conecte los componentes de acuerdo con el diagrama proporcionado.
- Conecte la placa Arduino Nano ESP32 a su computadora mediante un cable USB.
- Abra el IDE de Arduino en su computadora.
- Seleccione la placa Arduino Nano ESP32 y su puerto COM correspondiente.
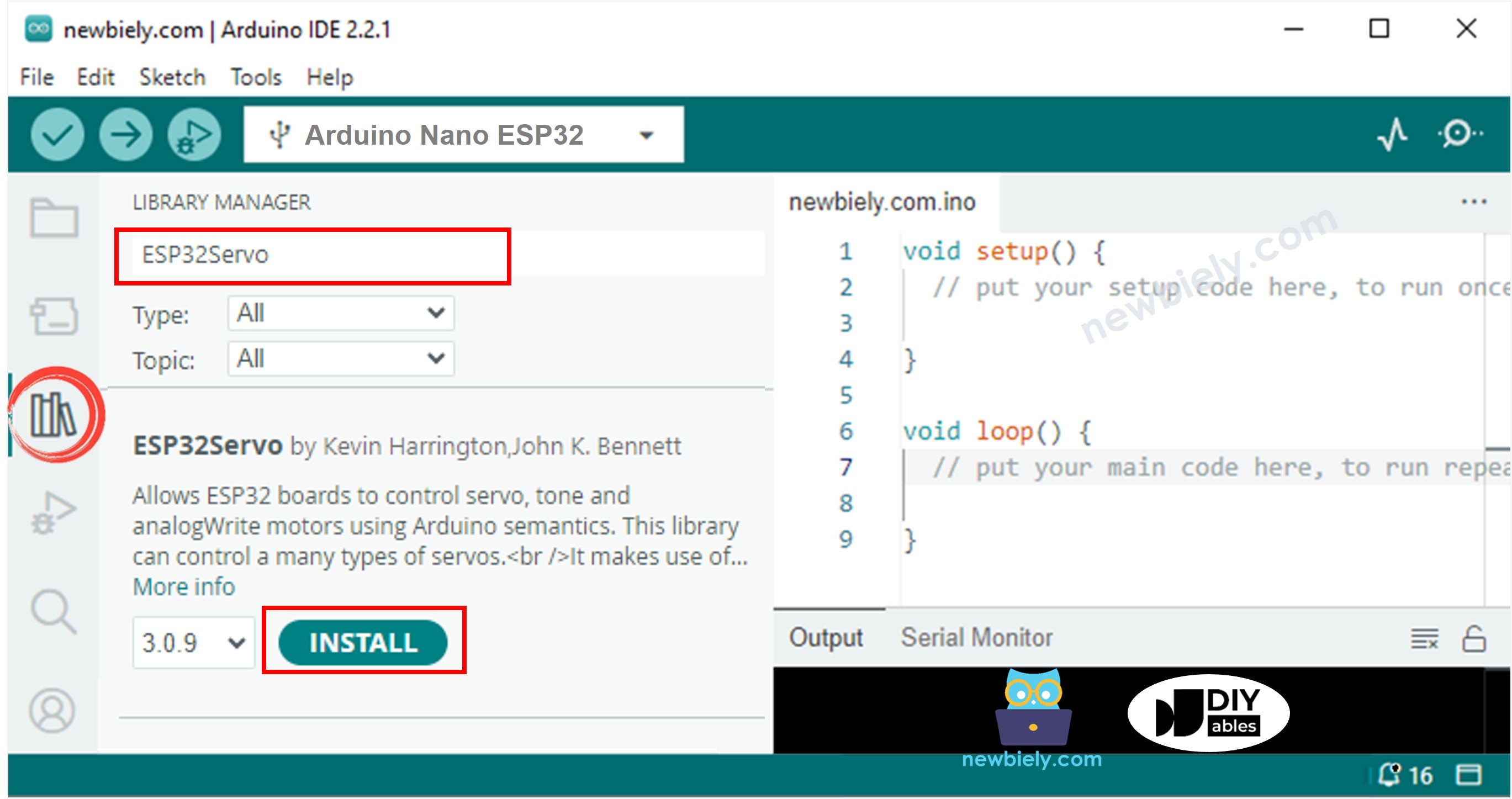
- Haga clic en el icono Libraries en la barra izquierda del IDE de Arduino.
- Escriba ESP32Servo en la caja de búsqueda, luego busque la biblioteca de servos de Kevin Harrington y John K. Bennett.
- Haga clic en el botón Instalar para instalar la biblioteca de servomotores para Arduino Nano ESP32.
- Conecta Arduino Nano ESP32 al PC mediante un cable USB
- Abre el IDE de Arduino, selecciona la placa y el puerto correctos
- Copia el código anterior y ábrelo con el IDE de Arduino
- Haz clic en el botón Subir en el IDE de Arduino para cargar el código en el Arduino Nano ESP32

- Vea el resultado: el servomotor gira lentamente de 0° a 180° y luego vuelve a girar lentamente de 180° a 0°.
Explicación del código
Puedes encontrar la explicación en la línea de comentarios del código de Arduino anterior.
Cómo controlar la velocidad de un servomotor
Al usar las funciones map() y millis(), podemos controlar la velocidad del servomotor de forma suave sin bloquear el resto del código.
Video Tutorial
Estamos considerando crear tutoriales en video. Si considera que los tutoriales en video son importantes, suscríbase a nuestro canal de YouTube para motivarnos a crear los videos.